

External safety control apparatus, method and system for flight of multi-rotor unmanned plane
A multi-rotor unmanned aerial vehicle, safety control technology, applied in the direction of control/adjustment system, three-dimensional position/course control, vehicle position/route/height control, etc., can solve the problem of low cost performance, and achieve strong versatility and calculation results Objective, easy to install and use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to make the object, technical solution and advantages of the present invention clearer, the implementation manner of the present invention will be further described in detail below in conjunction with the accompanying drawings.
[0024] The principle of the safe flight control method of the multi-rotor UAV is analyzed as follows:
[0025] (1) Taking the six-rotor UAV as an example to analyze the flight dynamics of the multi-rotor UAV
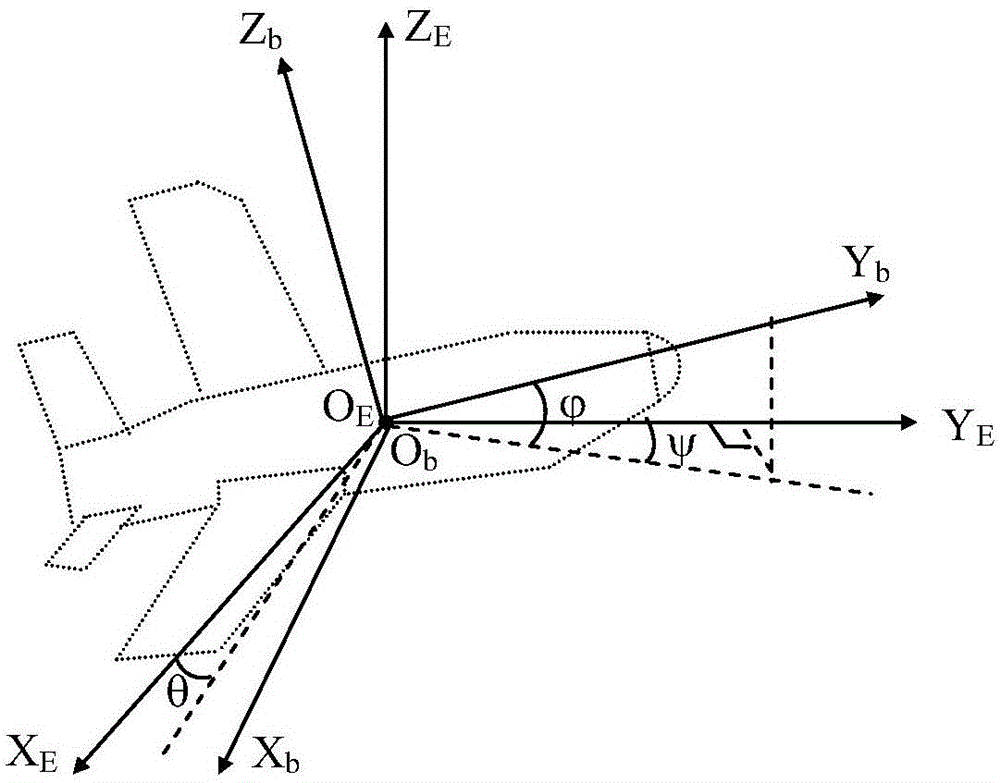
[0026] Such as figure 1 As shown in , is a schematic diagram of a UAV attitude angle definition method, where the angles ψ, θ, Yaw angle, roll angle, and pitch angle, respectively. In the figure, define R E =(O E ,X E ,Y E ,Z E ) represents the navigation coordinate system, and the origin O of the coordinate system E At the position of the center of gravity of the UAV motion carrier, O E x E Axis pointing east, O E Y E axis pointing north, O E ZE The axis points vertically upwards to the surface according to the rig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More