

Path planning algorithm for multi-robot team formation in three-dimensional space
A multi-robot, robot technology, applied in two-dimensional position/channel control, instrument, vehicle position/route/altitude control and other directions, can solve the difficulty of accurate formation control of multi-robot systems, and the formation control method cannot be well applied Formation control and high complexity of formation control algorithms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] Define the robot's coordinates and pose with a matrix Indicates that x, y, z represent the position of the robot in the Cartesian coordinate system, θ, Indicates the attitude direction of the robot in the Cartesian coordinate system.
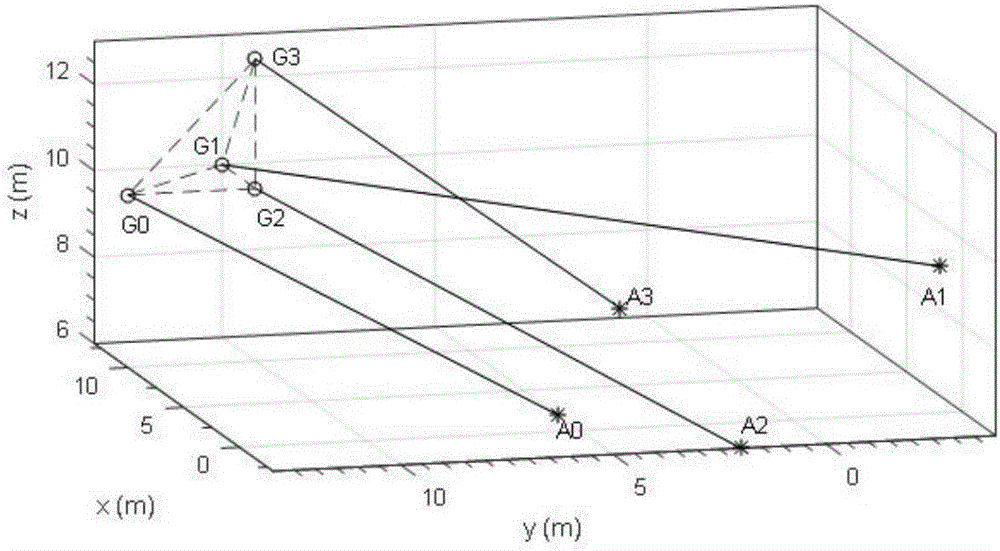
[0042] Take four robots forming a tetrahedron-shaped multi-robot formation shape as an example.
[0043] The initial coordinates are:
[0044] The coordinates of each vertex of the target formation shape are:
[0045] All task assignment methods in the four-robot formation system are shown in Table 1.
[0046] Table 1 All task allocation methods in the four-robot formation system
[0047] k Sumdistance(m) T cost (s)
n 1 44.9762 20.5921 0.8845 2 46.0676 21.4316 0.9133 3 52.5190 21.5433 0.9783 4 51.6614 24.6755 1.0382 5 50.6772 24.6755 1.0286 6 52.6262 21.5433 0.9793 7 46.0676 20.5921 0.8950 8 47.1590 21.4316 0.9239 9 51.6614 20.5921 0.9493 10 5...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More