

Interaction method and interaction system, and acquisition method of relative depth
An interaction method and interaction object technology, which are applied in the fields of relative depth acquisition, interaction method and interaction system, can solve the problems of somatosensory interaction delay, time-consuming, and complicated calculation steps, and achieve the effect of avoiding tedious calculation and improving speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
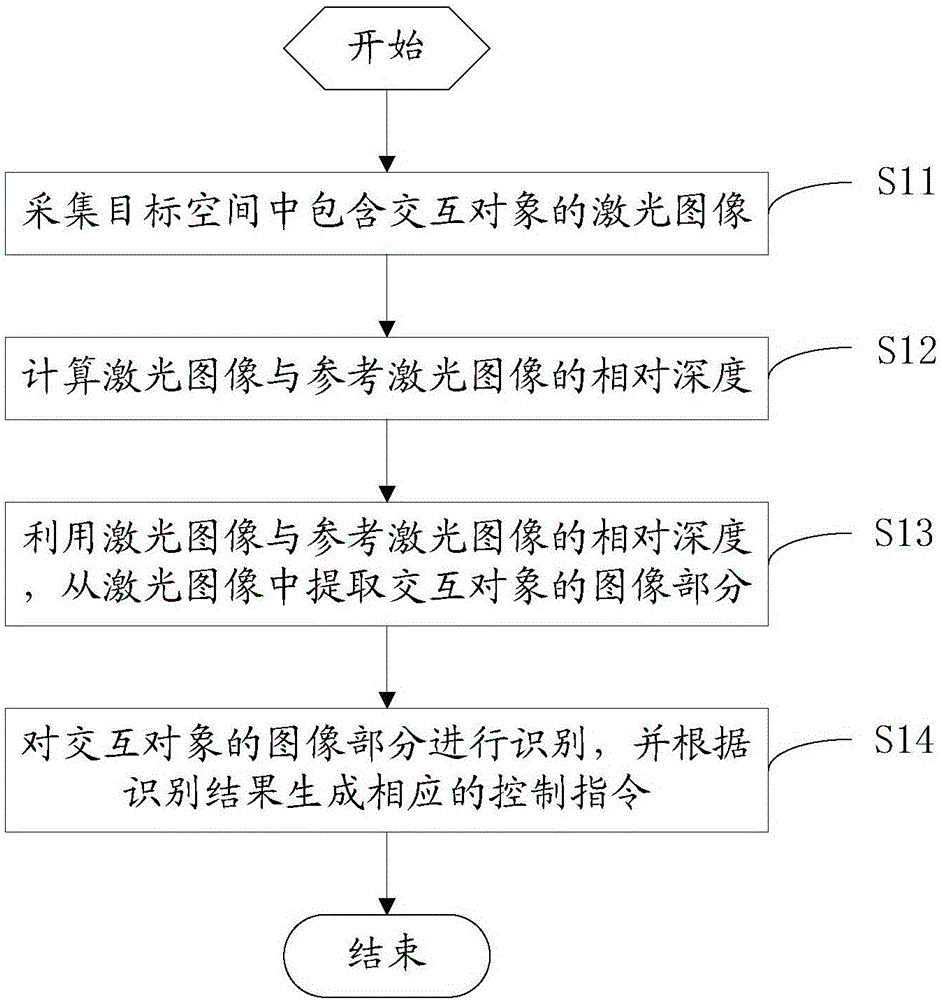
[0023] refer to figure 1 , figure 1 It is a schematic flowchart of an embodiment of an interaction method based on a relative depth image in the present invention, and the method includes:
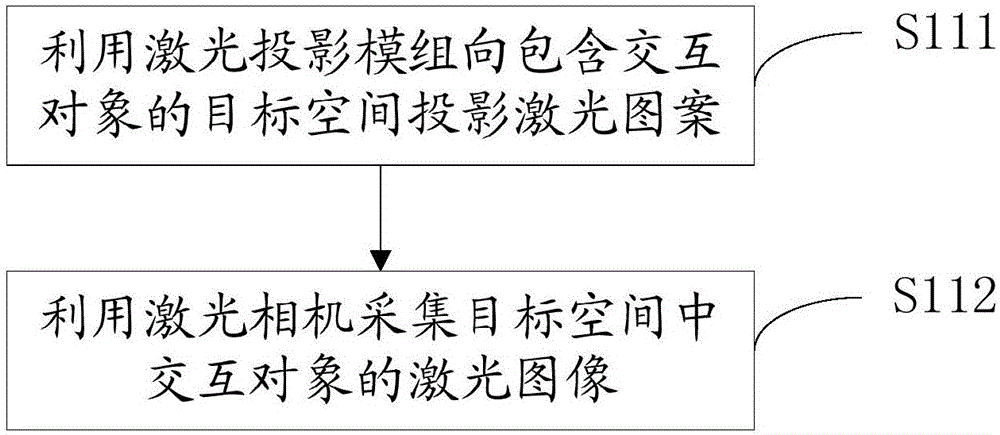
[0024] S11: Acquiring laser images containing interactive objects in the target space.
[0025] Among them, the target space can be a space of any shape and size, or the space area that can be covered by the equipment that collects laser images; the interactive object is generally an object that can move to generate interactive information, such as the human body, of course, it can also be Robots, robotic arms, and other objects that can interact.
[0026] Among them, the laser image is a laser image presented under laser projection in the target space containing interactive objects, and is generally collected by a dedicated laser camera. For example, the laser may be an infrared laser, an ultraviolet laser, or the like.
[0027] optional, such as figure 2 As shown, in an implementat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More