

Visual positioning and navigating method of robot
A robot vision, positioning and navigation technology, applied in the field of robot navigation, can solve problems such as insufficient automation, low standardization, and labor-intensive
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] Reference Figure 1-5 , The robot visual positioning and navigation method of the present invention is mainly based on a robot visual positioning and navigation system based on server 1 and robot 2. The system includes server 1 and robot 2, and server 1 and robot 2 are connected in communication. The robot vision positioning navigation method of the present invention includes the following steps:
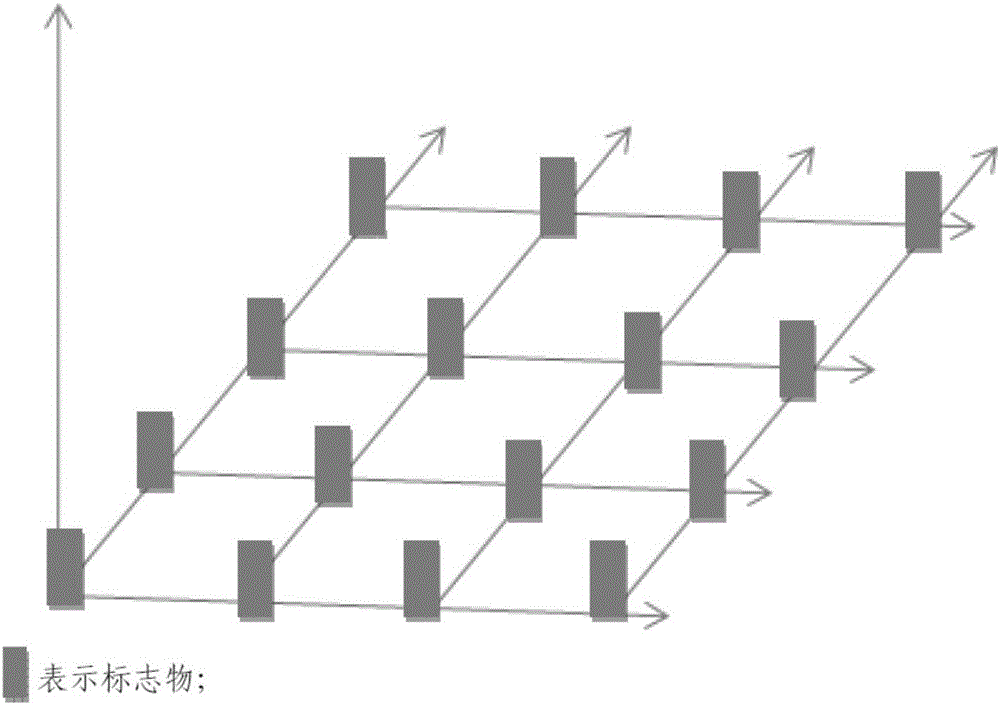
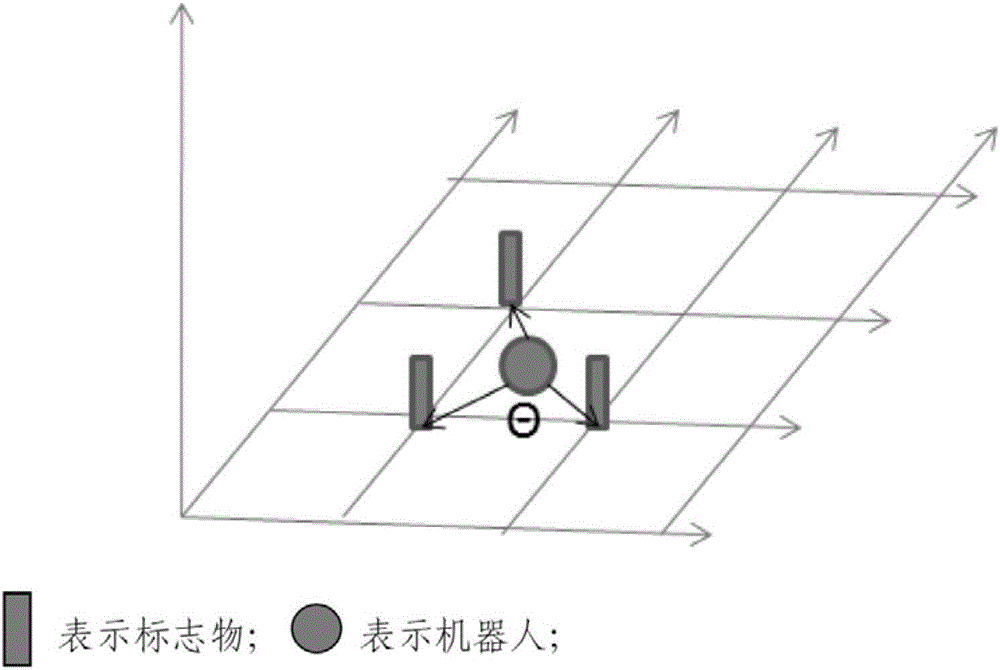
[0052] Reference figure 1 , Set the coordinate system according to the size of the site. In the coordinate system, set m×n markers distributed in a matrix. The markers are located on the coordinate nodes, and the distance between adjacent markers is selected as a fixed value. Each marker uses a different content. The image of is used as a distinguishing sign. The marker divides the site into a number of square areas, each square area corresponds to four markers, and each area is provided with a sensor to form a sensing area.
[0053] Among them, the definition of markers: items p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More