

Synchronous orbit satellite relative dip angle remote correcting method based on line-of-sight measurement
A synchronous orbit satellite, relative inclination technology, applied in the directions of artificial satellites, space navigation equipment, space navigation aircraft, etc., can solve the problems of distance estimation error accumulation, lack of tracking spacecraft relative distance information, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
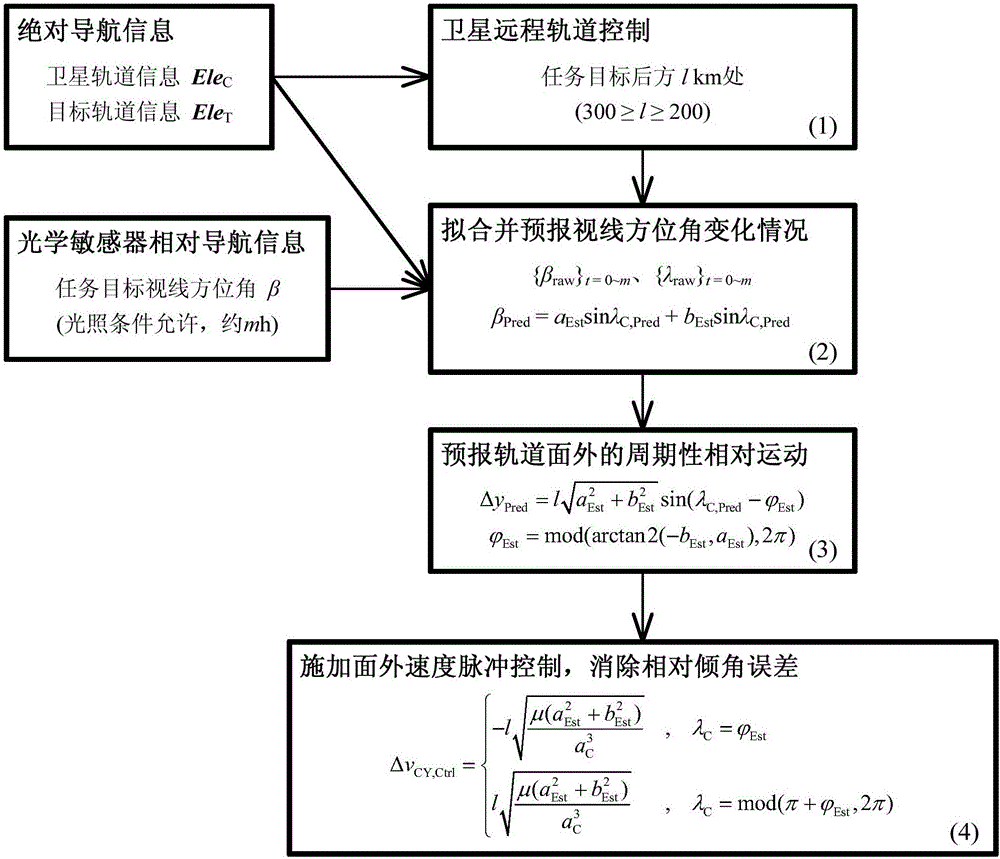
[0042] The method of the present invention mainly consists of 4 steps. The specific flow diagram of the method, such as figure 1 shown.
[0043] Step (1) Satellite remote orbit control
[0044] Geostationary orbit satellites provide absolute navigation information based on the ground measurement and control system (orbit information Ele C and mission target orbit information Ele T ), carry out remote orbit control on the geostationary orbit satellite, eliminate the relative semi-major axis, relative eccentricity, and relative inclination vector deviation between the mission target, and control the relative flat longitude, so that the geosynchronous orbit satellite is parked at 1 km behind the mission target ( 300≥1≥200).
[0045] Orbit information Ele of geostationary satellites C , refers to the semi-major axis a of the geostationary orbi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More