

Motion path planning method
A motion path and planning technology, applied in non-electric variable control, two-dimensional position/channel control, vehicle position/route/height control, etc., can solve the problem of tractor and trailer folding, extrusion, and path tracking control methods. The same problem, to achieve the effect of avoiding folding
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
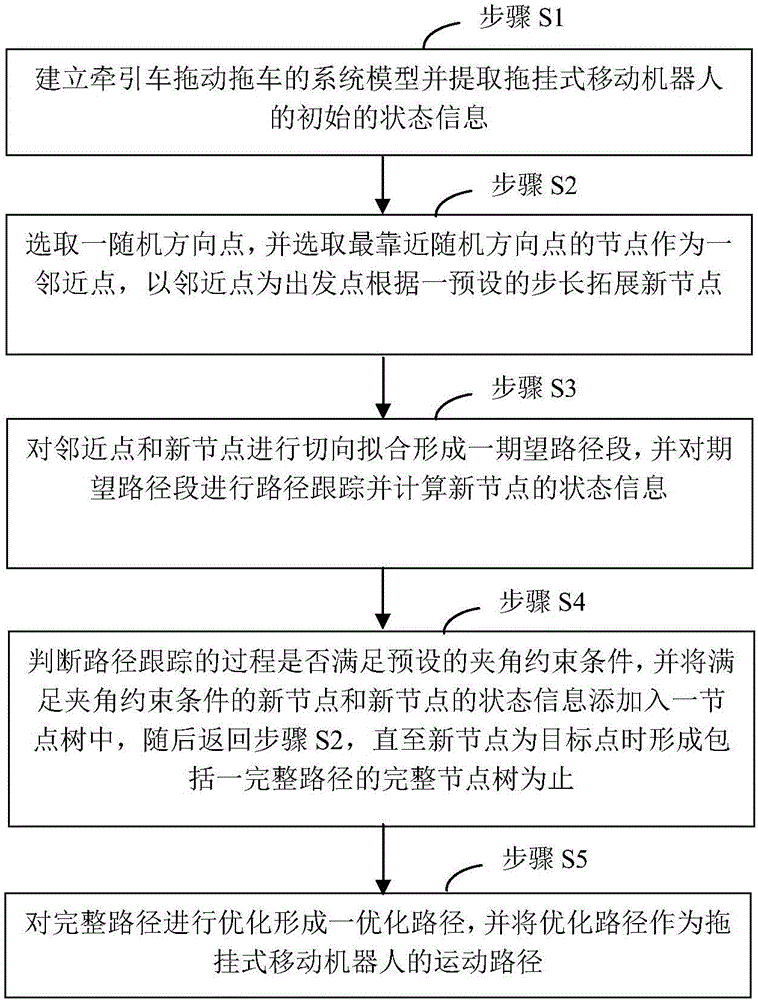
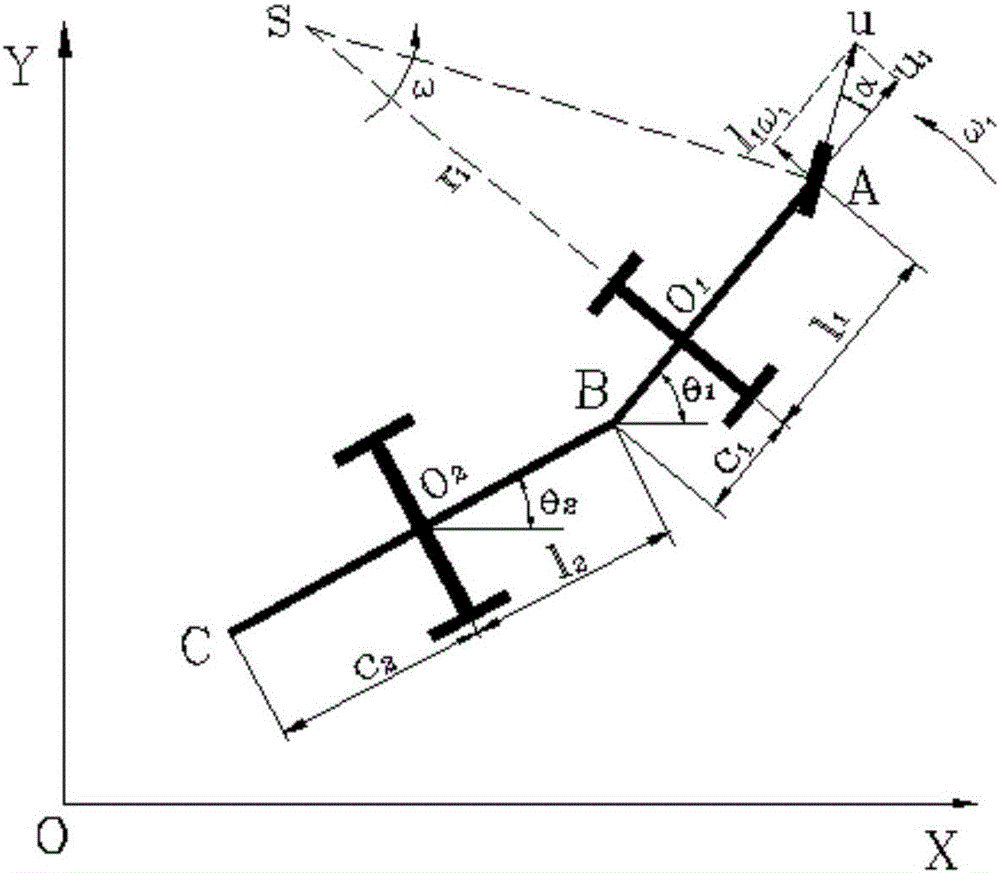
[0041] In a preferred embodiment, as figure 1 As shown, a motion path planning method is proposed, which can be applied to a trailer-type mobile robot. The trailer-type mobile robot can include such as figure 2 A tractor and a trailer are shown, and the tractor pulls the trailer to move towards a target point; the planning method may include:
[0042] Step S1: Establish the system model of the tractor towing the trailer and extract the initial state information of the trailer-type mobile robot;
[0043] Step S2: Select a random direction point, and select the node closest to the random direction point as a neighboring point, and use the neighboring point as a starting point to expand new nodes according to a preset step size;
[0044] Step S3: Perform tangential fitting on the adjacent points and the new node to form a desired path segment, and perfo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More