

Unmanned ship water surface target detection, identification and positioning method based on monocular camera and lidar information fusion
A technology of laser radar and water surface targets, which is applied in surveying and mapping and navigation, radio wave measurement systems, and measurement devices. short time effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with the accompanying drawings.
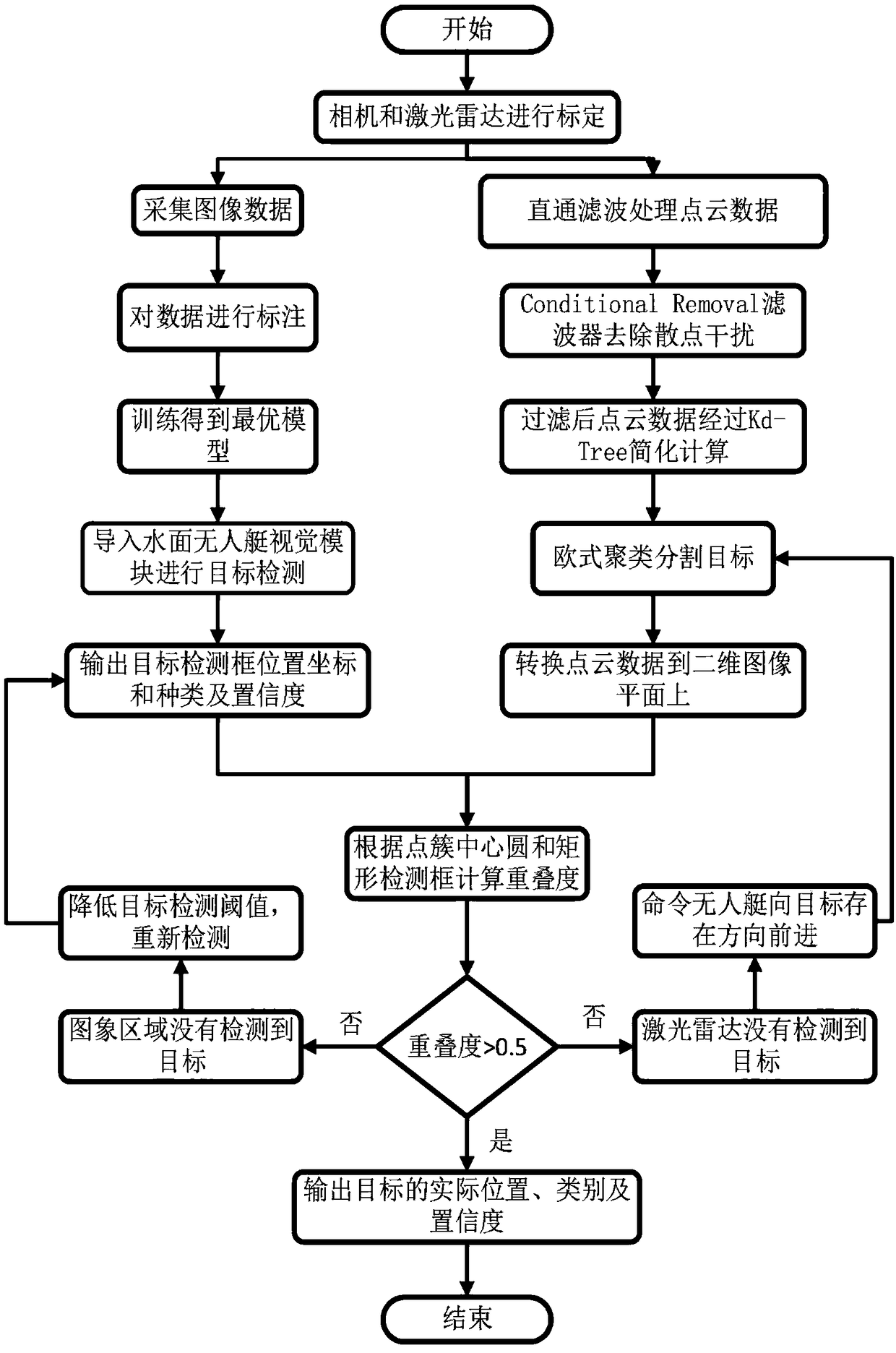
[0028] as attached figure 1 As shown, it is an overall block diagram of the method for detecting, identifying and locating unmanned surface targets based on monocular camera and lidar information fusion, including the following steps:
[0029] 1. First calibrate the camera and lidar, according to Zhang Zhengyou calibration method, according to S 0 m=K[R,T]X, find the X external parameter matrix, where S 0 is the scale factor, K is the camera internal reference, R is the rotation matrix, and T is the translation vector. Since the assembly position of the radar and the camera has been fixed, the extrinsic parameter matrix [R, T] has been fixed, and the precise value of the extrinsic parameter matrix X can be obtained through measurement and calculation. The camera internal parameter matrix is obtained through checkerboard calibration, and the data points in the 3D d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More