

Strapdown inertial navigation system coarse alignment method based on recursive quaternion
A strapdown inertial navigation and quaternion technology, which is applied in the direction of navigation, measuring devices, instruments, etc. through speed/acceleration measurement, can solve the problems of slow convergence speed and low accuracy of dual vector orientation determination
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
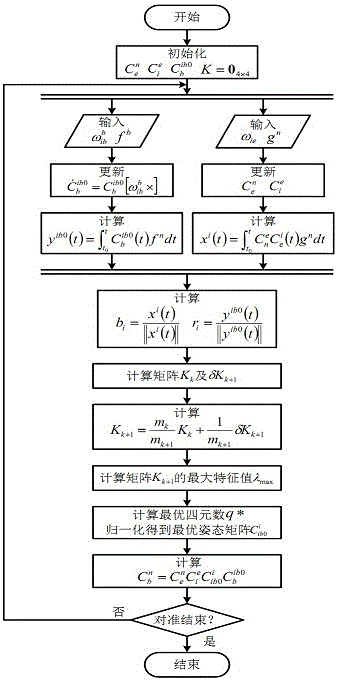
[0066] Such as figure 1 , the specific implementation steps of the present invention are as follows:
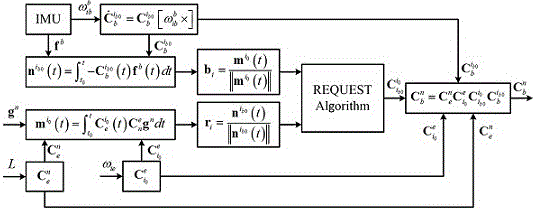
[0067] 1) First use the solidification method for rough alignment, and the initial attitude matrix Decompose into four matrices, and use the local latitude information to determine the coordinate transformation matrix Determining the Coordinate Transformation Matrix Using the Earth's Rotation Angular Velocity Using Gyroscope Output Data to Determine Coordinate Transformation Matrix
[0068] 2) Utilize the accelerometer output data and the gravitational acceleration information to determine the observation vector and the reference vector, unitize the observation vector and the reference vector, and determine the corresponding weight;
[0069] 3) Utilize the observation vector and reference vector obtained in step 2) to calculate the K at the current moment k matrix and innovation matrix δK k+1 ;
[0070] 4) Utilize the current moment K calculated in step 3) k matri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More