Wall-climbing robot
A wall-climbing robot and driving wheel technology, applied in the field of wall-climbing robots, can solve the problems of complex magnet layout, limited magnetic wheel adsorption capacity, inflexible steering, etc., to achieve straight forward or differential turning, stable straight forward or Differential cornering, the effect of reducing overall size and weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The specific implementation manners of the present invention will be described below in conjunction with the accompanying drawings.
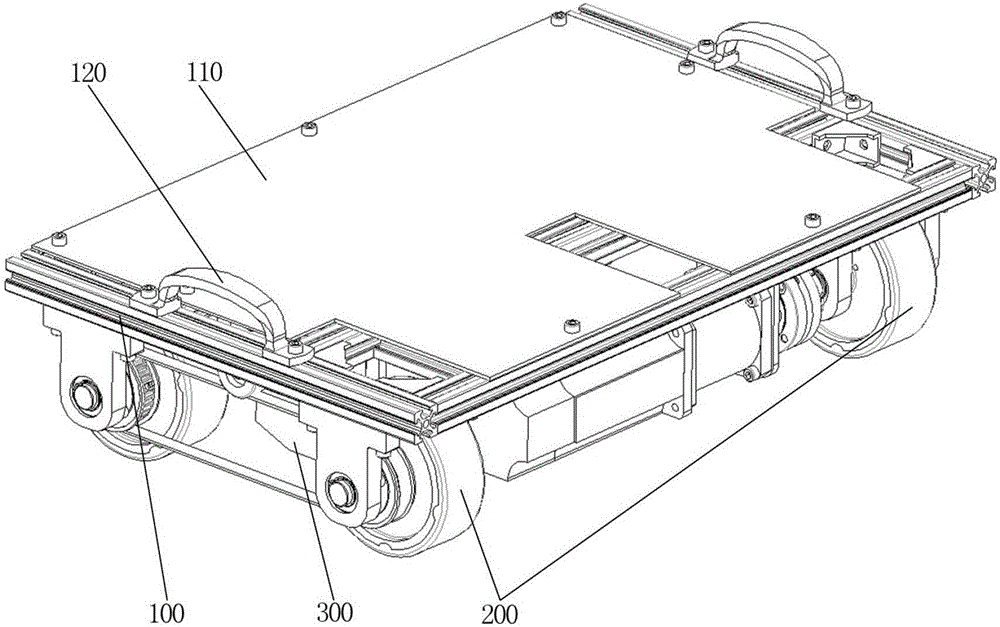
[0023] Such as figure 1 As shown, the present invention provides a wall-climbing robot, which includes a vehicle frame 100 , two synchronous running mechanisms 200 and an adsorption mechanism 300 . Both the synchronous running mechanism 200 and the adsorption mechanism 300 are located at the bottom of the vehicle frame 100 .
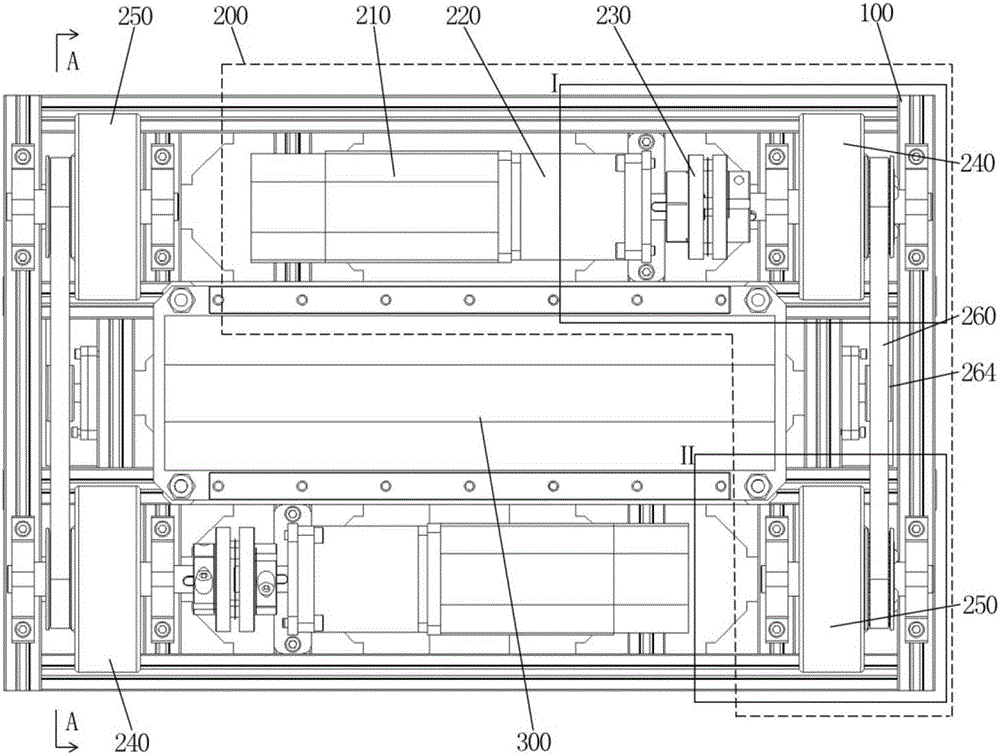
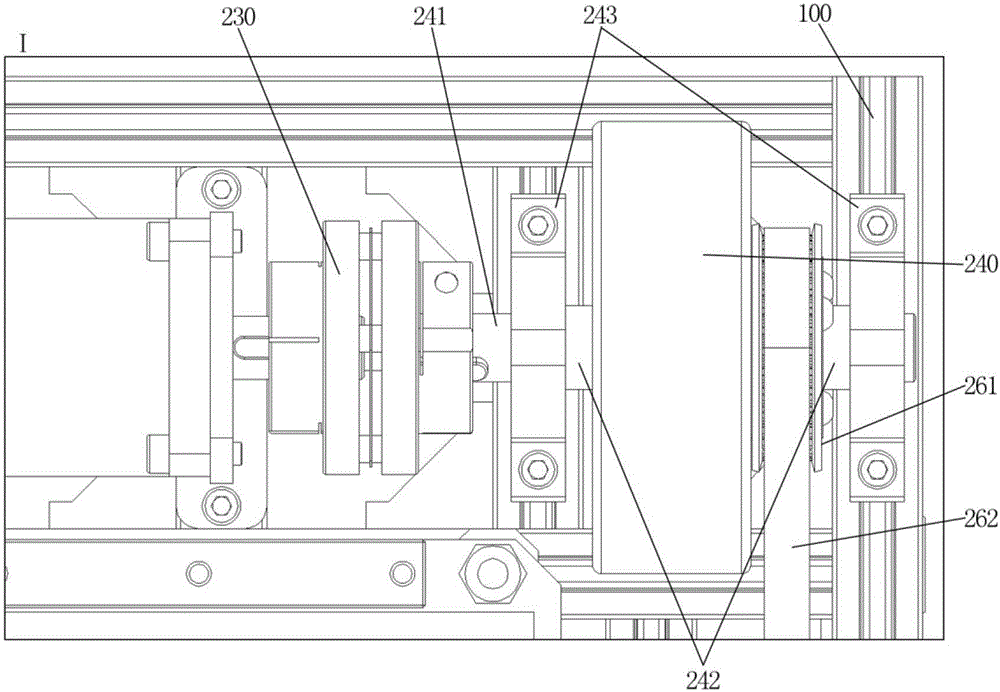
[0024] Such as figure 2 , 3 As shown in and 4 , the synchronous running mechanism 200 includes a motor 210 , a speed reducer 220 , a shaft coupling 230 , a driving wheel 240 , a driven wheel 250 and a transmission assembly 260 .
[0025] The driving wheel 240 has a rotating shaft 241 , two shaft sleeves 242 and two bearing seats 243 . The driving wheel 240 is sleeved on the rotating shaft 241 . The outward end of the rotating shaft 241 is installed on the edge of the bottom of the vehicle frame 100 through the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com