

A Target Detection Method for Small UAVs Based on Superpixels and Scene Prediction
A small UAV and target detection technology, which is applied in the field of image processing and UAV detection, can solve the problems of ignoring the significant information of the scene, the application range and the limitation of effectiveness, so as to shorten the detection time, reduce the false alarm rate, improve the The effect of precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] Below in conjunction with accompanying drawing and embodiment, describe technical solution of the present invention in detail:
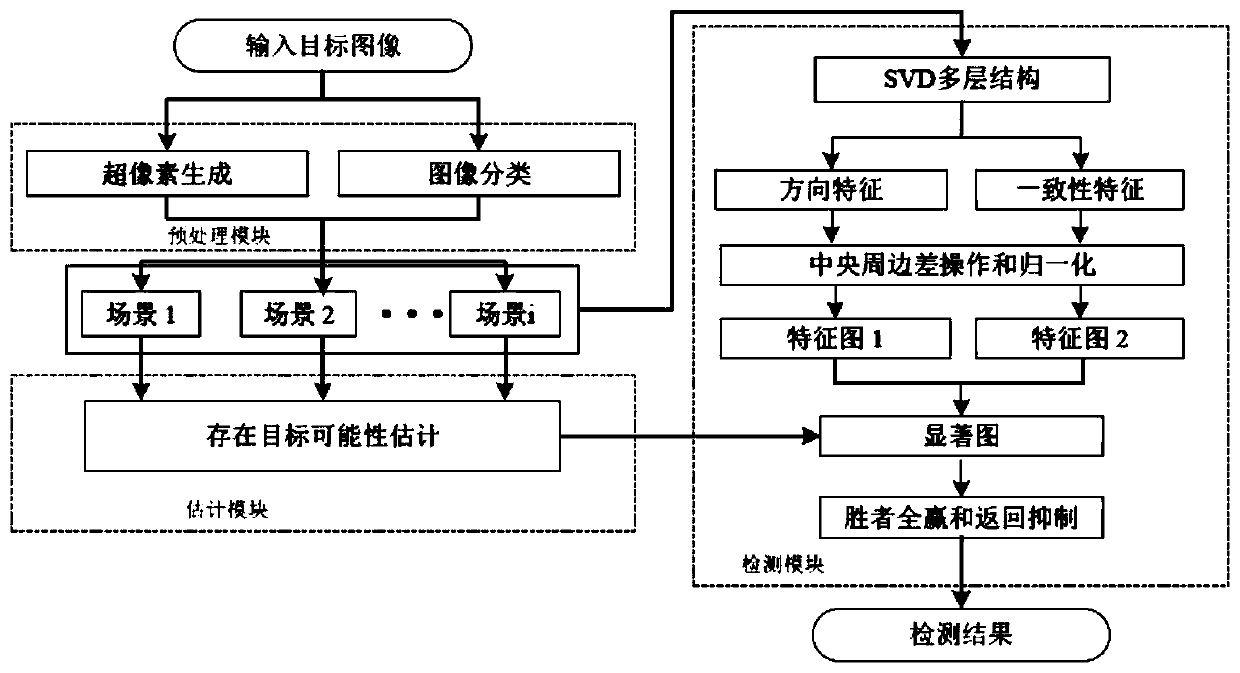
[0068] refer to figure 1 And the implementation method in the summary of the invention, the specific implementation steps of this example are as follows:
[0069] Step 1: Input the optical image to be detected, and convert multiple scenes into superpixel sets with different scene labels.
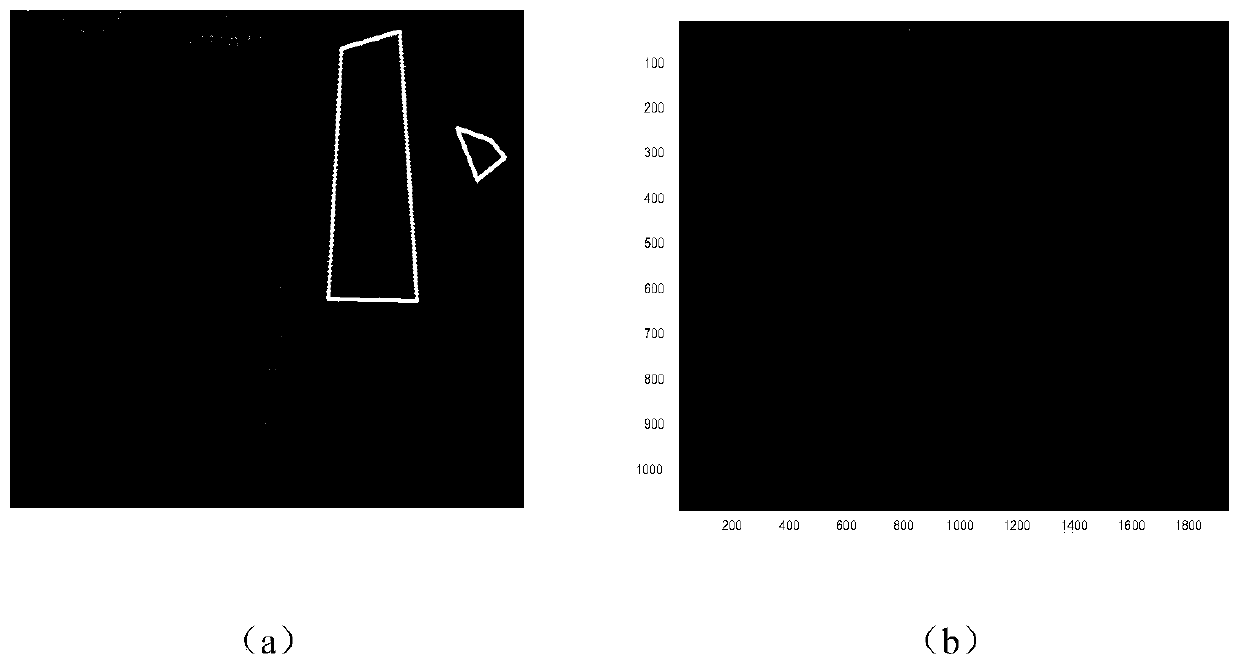
[0070] (1.1) Input an optical image plane.jpg containing a small drone target with a size of 1080*1920, and set the number of scenes to 2, such as figure 2 As shown, each scene is sampled twice, and the corresponding generated pixel sample information is saved as Image_SampleMask, that is, image data with scene labels label=1 and label=2;
[0071] (1.2) Input plane.jpg, use the SLIC algorithm to generate superpixels, so that the edge of the superpixel block wraps the target edge as optimally as possible, and save the superpixel image Image_MPFeatureSp;
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More