

A method and system for unmanned aerial vehicle calibration based on color three-dimensional calibration object
A stereo calibration and color stereo technology, which is applied in the field of computer vision, can solve the problems of cumbersome actual operation, difficult visual recognition errors, limited reconstruction space range, etc., and achieves the effects of high detection accuracy, convenient use, and easy and accurate measurement.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
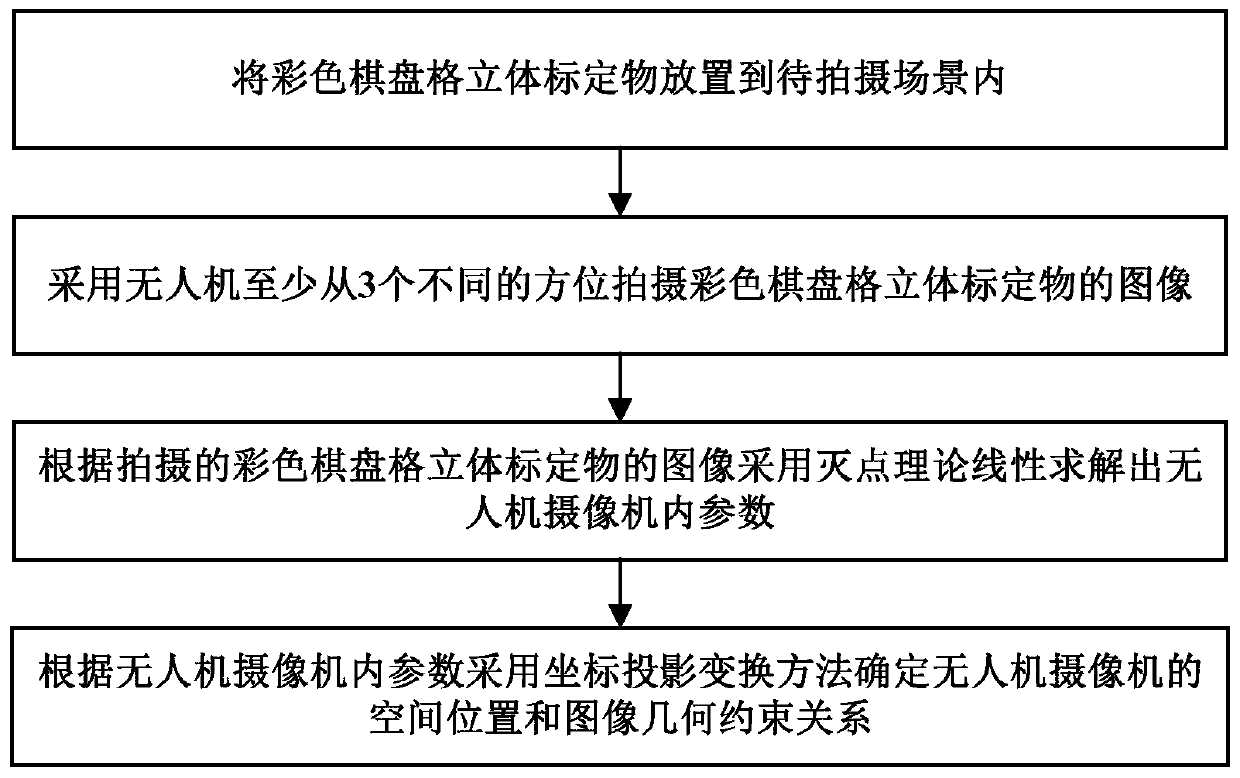
[0066] Aiming at the problems of difficult accurate measurement, low detection accuracy, inconvenient placement, weak versatility and inconvenient use in the existing technology, the present invention proposes a brand-new calibration method and system for unmanned aerial vehicles. The calibration process of the UAV in the present invention includes two aspects: one is to design a three-dimensional calibration object that is easy to accurately measure, standard and easy to operate, and the other is to provide a method for camera parameter calibration and image geometric constraints. The content of these two aspects will be described in detail below.
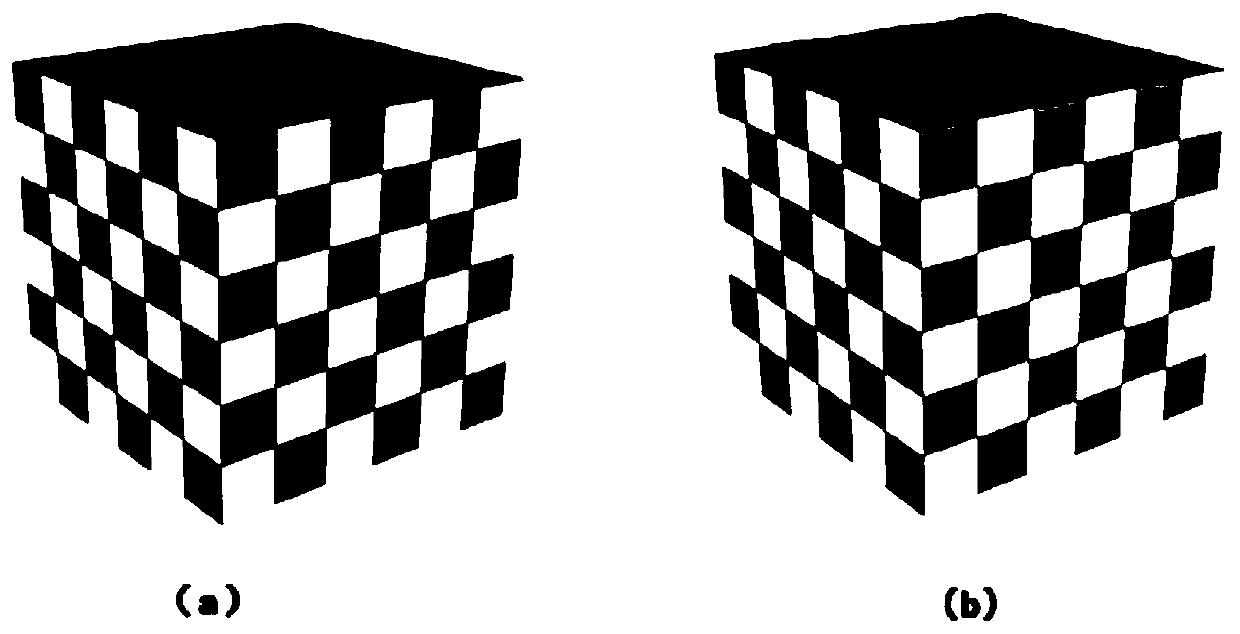
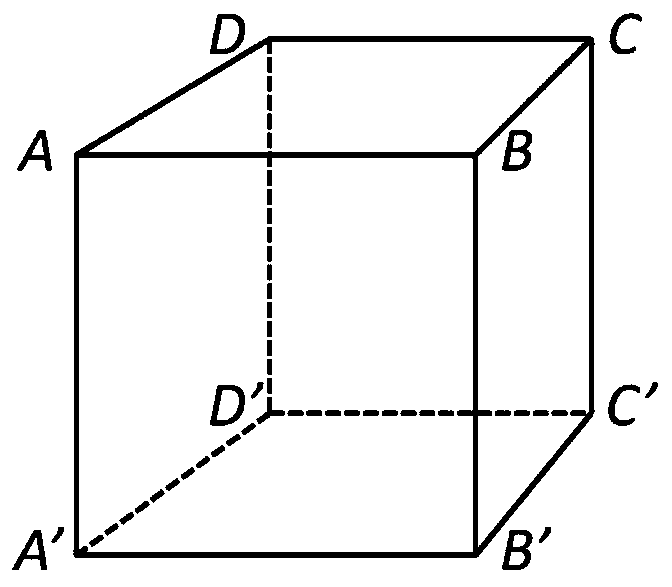
[0067] (1) Design a stereoscopic calibration object
[0068] In order to facilitate the observation of the operator during the shooting operation and the recognition during the post-export photo processing, as well as the setting of different angle ratio constraints in the modeling scene after 3D modeling, the surface of the UAV c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More