

Capturing device with position compensation and method
A capture device and chassis technology, applied in two-dimensional position/channel control, manufacturing tools, program control manipulators, etc., can solve problems such as difficult to capture targets and difficult optimal landing points, and achieve good anti-interference performance and clear principles , real-time response fast effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
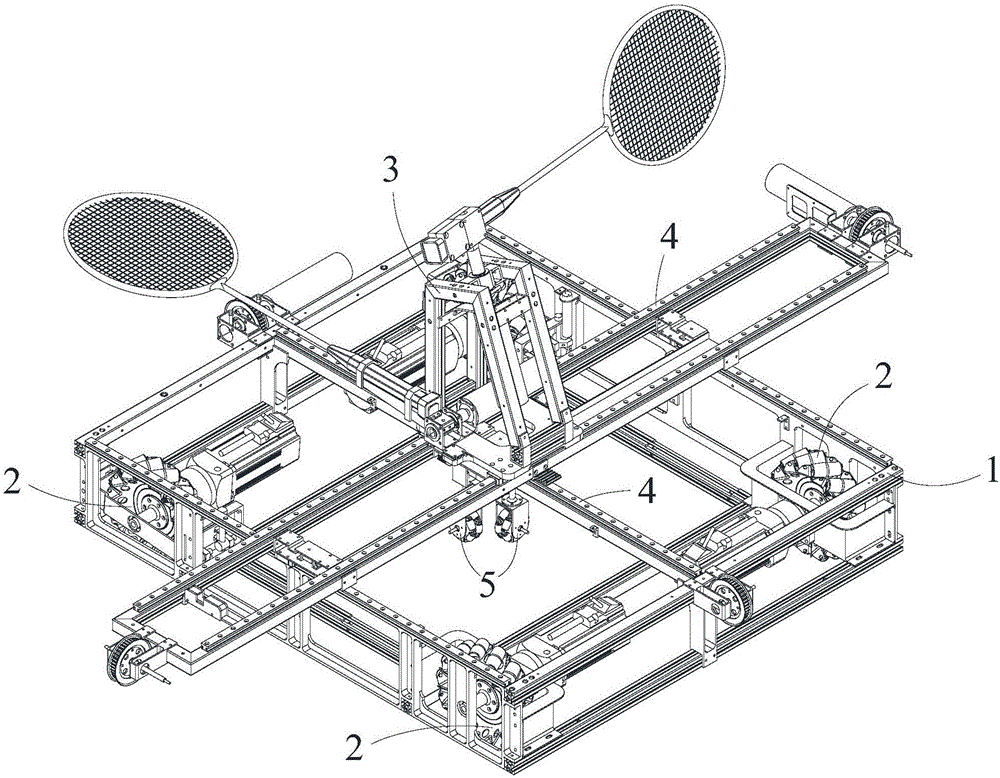
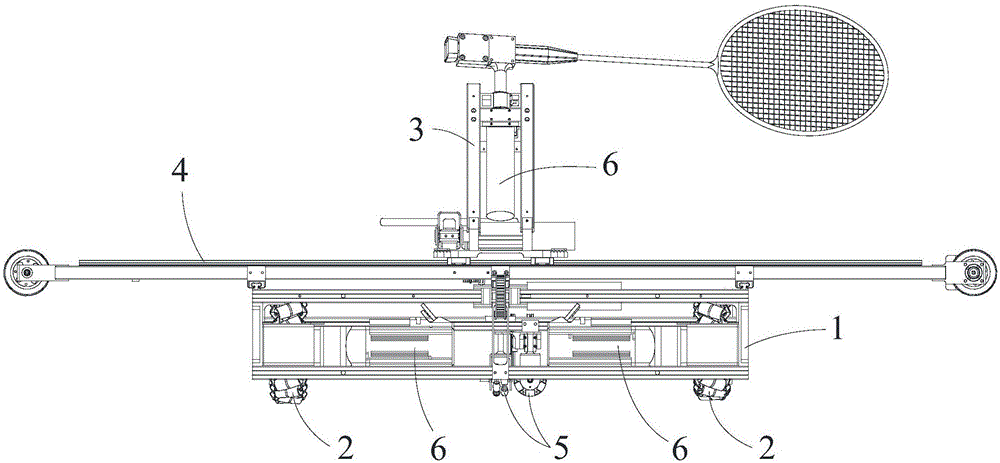
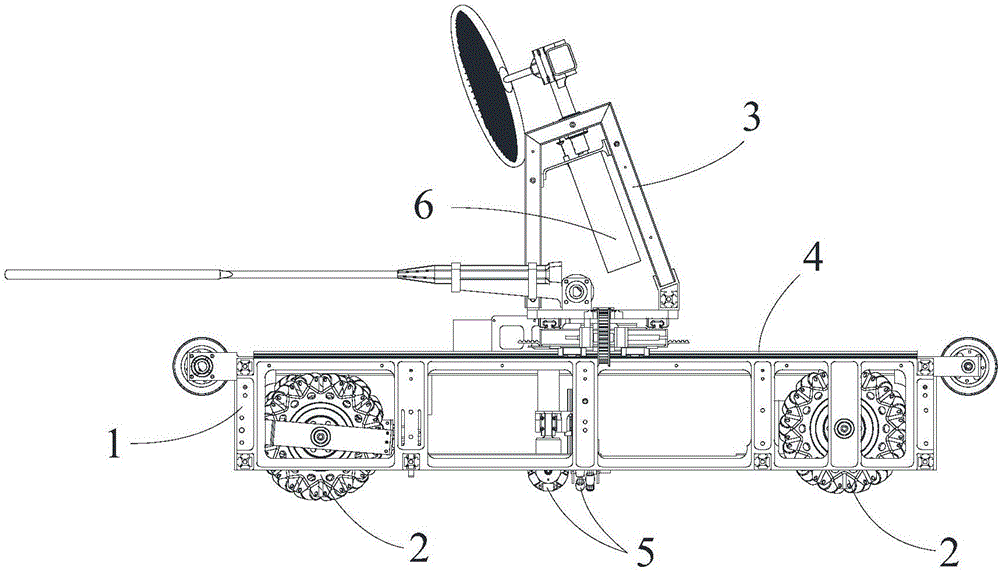
[0067] like Figure 1-8 As shown, a capture device with position compensation according to the present invention includes a drive system, a control system and a chassis 1 provided with at least one traveling wheel 2, and also includes:
[0068] The target mechanism 3 includes a support member 31 on which at least one rotating member 32 is provided, and each rotating member 32 is connected to a badminton racket 33, and the badminton racket 33 rotates relative to the supporting member 31 and uses For hitting badminton, or each rotating part 32 is connected with a tennis racket, and the tennis racket is rotated relative to the supporting part 31 for hitting tennis, or each rotating part 32 is connected with a baseball bat, so The baseball bat rotates relative to the support member 31 for hitting the baseball;
[0069] The moving mechanism 4 is arranged on the chassis 1 and is connected to the target mechanism 3, and the moving mechanism 4 is used to drive the target mechanism 3 ...
Embodiment 2
[0079] like Figure 1-9 As shown, the compensation method of the present invention, using the capture device with position compensation as described in Embodiment 1, includes the following steps:
[0080] A. The control system obtains the landing area of the target in real time, and controls the drive system to drive the chassis 1 to move to the landing area and correct it in real time;
[0081] B. When the chassis 1 moves to the landing point area, all traveling wheels 2 are braked, and the chassis 1 continues to slide under the action of inertia;
[0082] C. The orthogonal omnidirectional wheel component 52 continues to work during the period when the chassis 1 starts to brake all the traveling wheels 2 and inertial moves, so that the motion detection component 51 continues to work in real time, and the motion detection component 51 will detect all the The deviation value between the chassis 1 and the target is fed back to the control system;
[0083] D. The control syst...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More