

A bipedal robot walking mechanism with linear joints
A biped robot and walking mechanism technology, applied in the field of robotics, can solve problems such as difficult operation, greater energy consumption, and complicated control methods, and achieve the effect of carrying heavy loads, less energy consumption, and simple control methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with the drawings and embodiments.
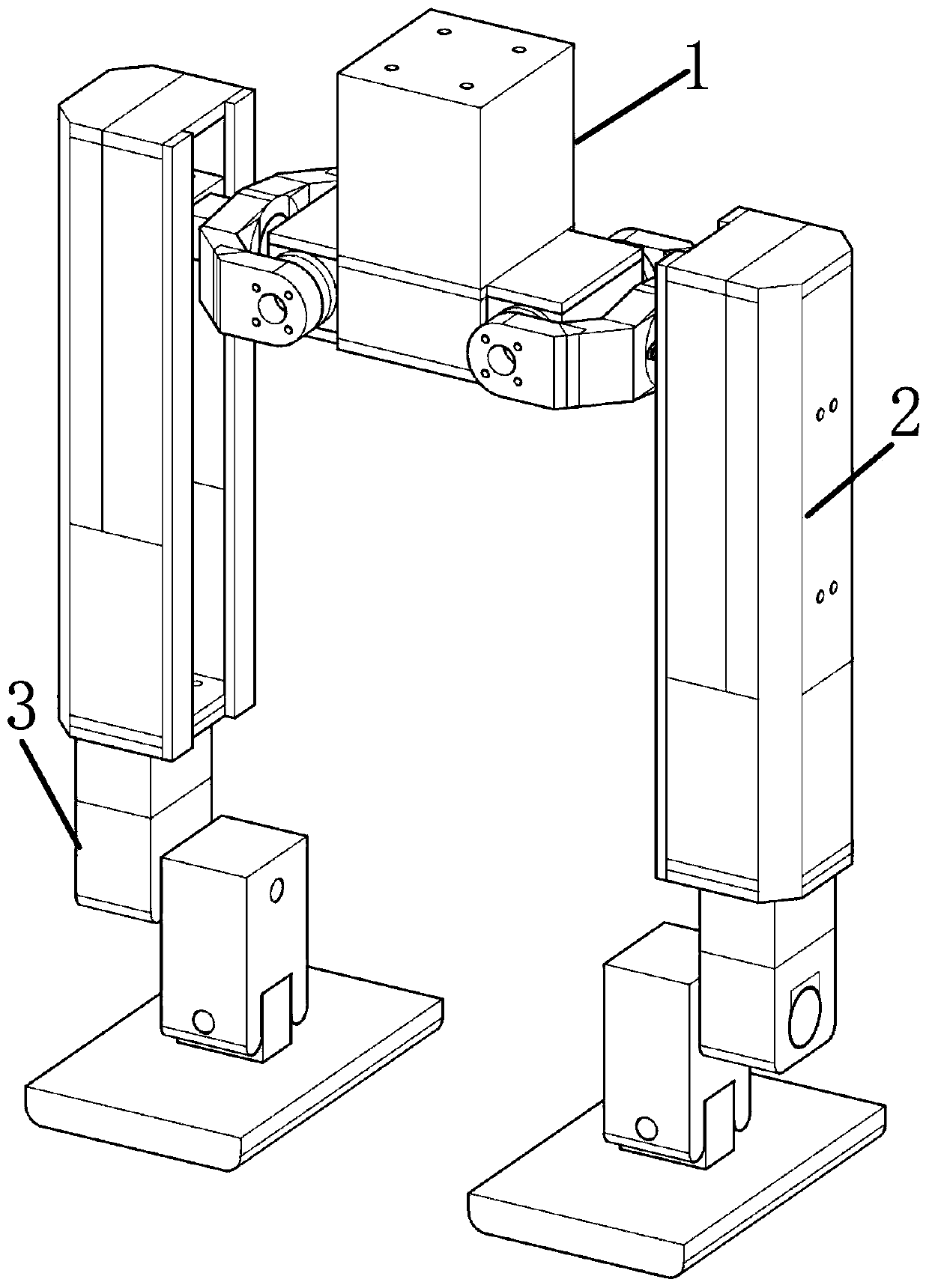
[0028] Such as figure 1 As shown, a walking mechanism of a biped walking robot includes a waist mechanism 1, a leg mechanism 2, and a foot mechanism 3. The leg mechanism 2 and the foot mechanism 3 are symmetrically placed on both sides of the waist mechanism 1.
[0029] The waist mechanism 1 is used to connect the torso of the biped robot with the leg mechanism 2. The upper part of the waist mechanism 1 can be provided with a load-bearing platform. When the torso is not required, the load can be reset on the waist platform to realize the load-bearing transportation function of the biped robot. The control system of the robot is integrated in the waist mechanism 1.
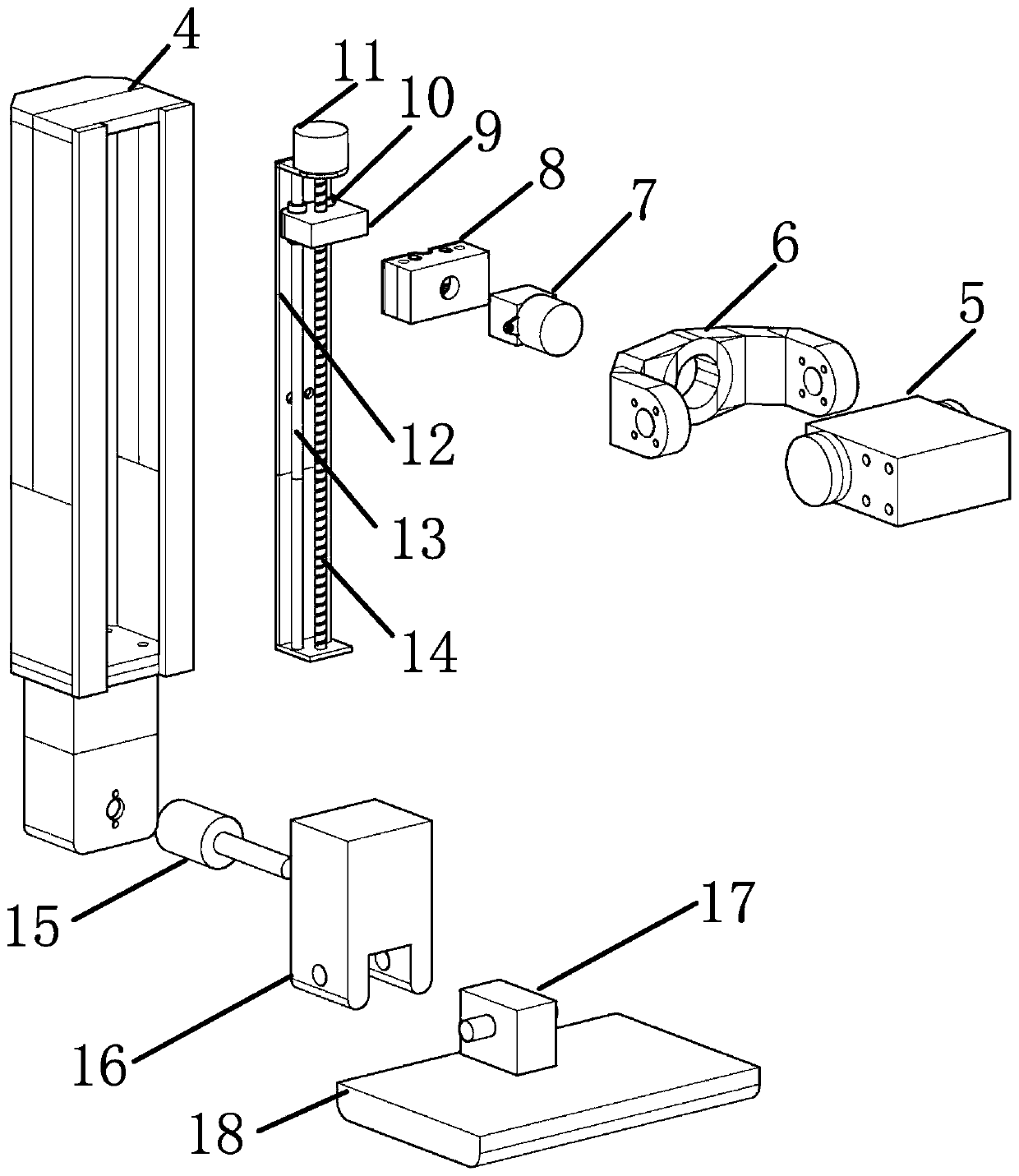
[0030] The leg mechanism 2 includes a leg body, and a linear joint is arranged in the leg body. The linear joint includes a driving part and a driven part. The driven part is connected to the lateral rotation p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More