Method for driving link mechanism in variable motion range to grasp industrial wastes by servo motor
A servo motor and link mechanism technology, applied in the field of machinery, can solve the problems such as the variable degree of freedom mechanism of the industrial waste grabbing machine, the large influence of the hydraulic oil temperature, and the pollution of the hydraulic oil to the environment, so as to improve the stability and reliability. high performance, compact structure and good dynamic performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
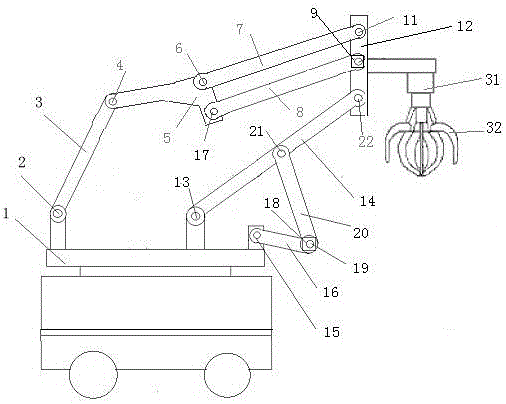
[0008] A method for grabbing industrial waste by using a servo motor-driven variable-movement link mechanism, characterized in that the servo-motor-driven variable-movement link mechanism includes a base 1, a boom elevating mechanism, and a wrist link pitching mechanism , a servo drive device and a first locking device 9 and a second locking device 19; the base 1 is installed on a movable slewing platform; the boom lifting mechanism is composed of a boom 14 and a lifting mechanism, and the boom 14 is connected to the base 1 through the seventh rotating pair 13, the fourth connecting rod 16 of the lifting mechanism is connected to the base 1 through the eighth rotating pair 15, and the other end is connected to the fifth connecting rod 20 through the ninth rotating pair 18 , the other end of the fifth connecting rod 20 is connected with the boom 14 through the tenth rotating pair 21; Connected to the boom 14, the pitching mechanism is composed of the active rod 3, the first con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com