

Method for operating an automatically driven, driverless motor vehicle and monitoring system
A self-guided, unmanned technology, used in control/regulation systems, transportation and packaging, non-electric variable control, etc., can solve problems such as uncertainty, unknown objects, and reliability, and achieve good readability , wide detection, easy readout effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
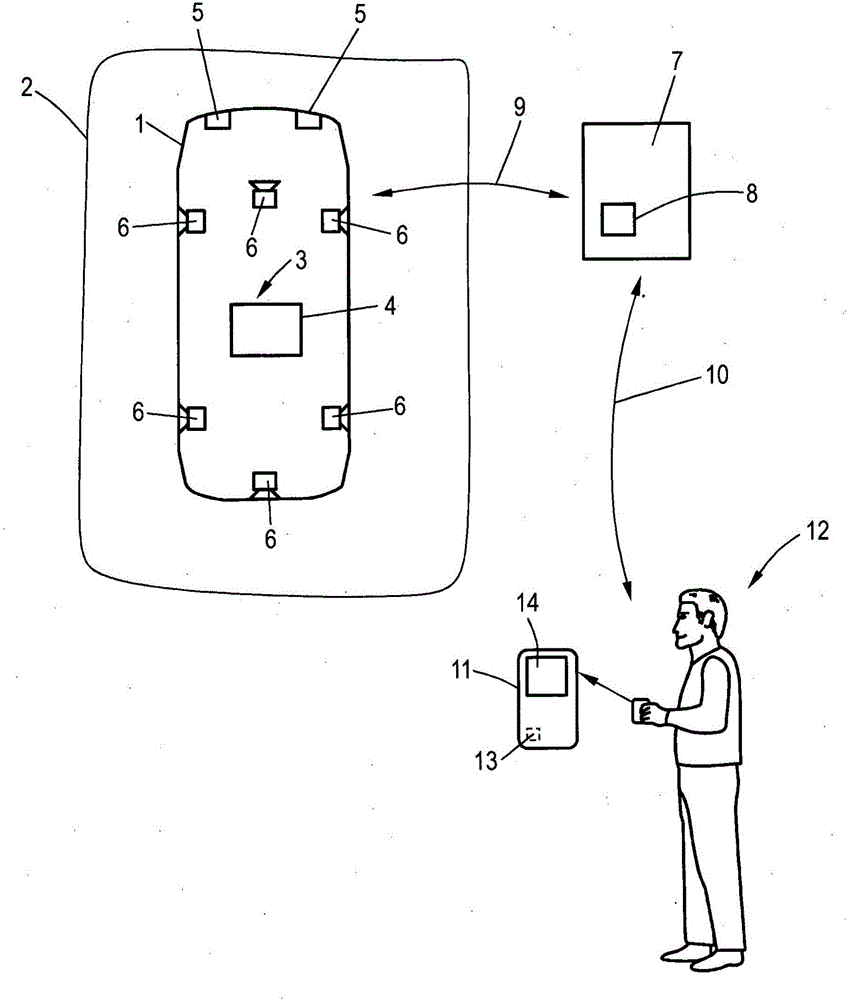
[0028] figure 1 The monitoring system according to the invention is shown in schematic form, which is installed here in a parking area, in particular in a parking garage, wherein a correspondingly designed motor vehicle can be driven unmanned and fully automatically guided to its corresponding parking space and park there or exit the parking lot. Of course, the method described can however also be used in other areas which can be driven completely autonomously by motor vehicles.
[0029] The motor vehicle 1 is located in a parking area 2 shown here only schematically and is operated fully automatically without a driver, for which a corresponding vehicle system 3 with a control device 4 is used, which is also designed for For carrying out the motor vehicle steps of the method according to the invention which will be explained below. The motor vehicle 1 has a plurality of environmental sensors, of which only a radar sensor 5 and six cameras 6 are shown here for reasons of clar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More