

Camera calibration method and device for visual navigation unmanned aerial vehicle
A camera calibration and visual navigation technology, applied in image analysis, image data processing, instruments, etc., can solve the problems of complex implementation process and low precision, and achieve the effect of avoiding the selection process, simplifying the operation process, and reducing the complexity of the algorithm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] In order to enable those skilled in the art to better understand the solution of the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. Apparently, the described embodiments are only some of the embodiments of the present invention, but not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
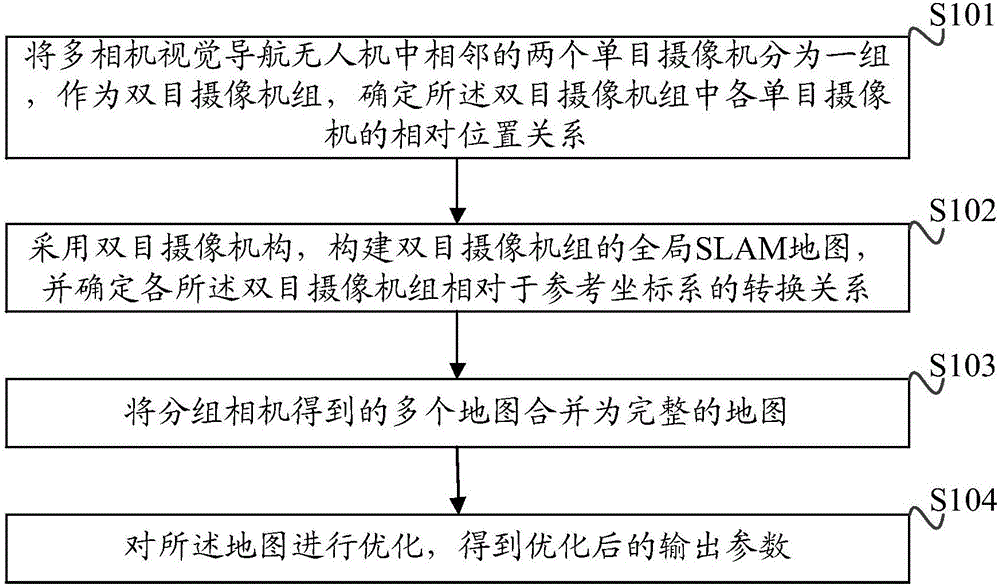
[0041] A flow chart of a specific embodiment of the camera calibration method of the visual navigation drone provided by the present invention is as follows figure 1 As shown, the method includes:
[0042] Step S101: Divide two adjacent monocular cameras in the multi-camera visual navigation drone into a group as a binocular camera group, and determine the relative positional relationship of each monocular ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More