Improvement method used for planning robot paths
A technology of path planning and robotics, applied in the direction of navigation computing tools, etc., can solve the problems of consuming a lot of time, computing resources and energy, and achieve the effect of saving energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described below in conjunction with specific drawings and embodiments.
[0023] The focus of the present invention is to find and move suitable key points to suitable positions, and its realization is divided into three steps: the first step is two-way path planning; the second step is to set and move key points; the third step is to plan the path in sections;
[0024] Step 1, two-way path planning:
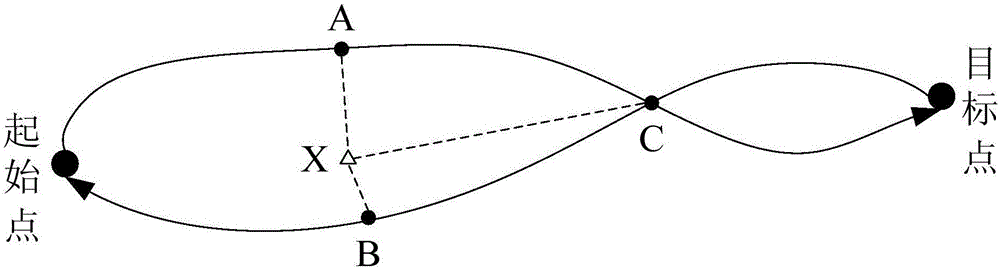
[0025] According to the two directions from the starting point to the target point and from the target point to the starting point, use the A* algorithm to plan the path respectively, and keep the paths planned by these two groups;
[0026] The paths of the two sets of plans are as follows: figure 1 As shown in , starting point->point C->target point (hereinafter referred to as path 1), target point->point C-starting point (hereinafter referred to as path 2); point C is the intersection of two groups of planned paths;
[0027] Step 2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com