A multi-degree-of-freedom rigidity variable pneumatic surgical operating arm and its manufacturing method
A technology of surgical operation and manufacturing method, applied in the field of multi-degree-of-freedom variable stiffness pneumatic surgical operating arm and manufacturing, can solve problems such as insufficient rigidity, difficulty in applying operating force, and low degree of freedom of movement, so as to reduce the number and size of wounds, Reduces rigid damage and increases the range of motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be further described below in conjunction with the drawings.
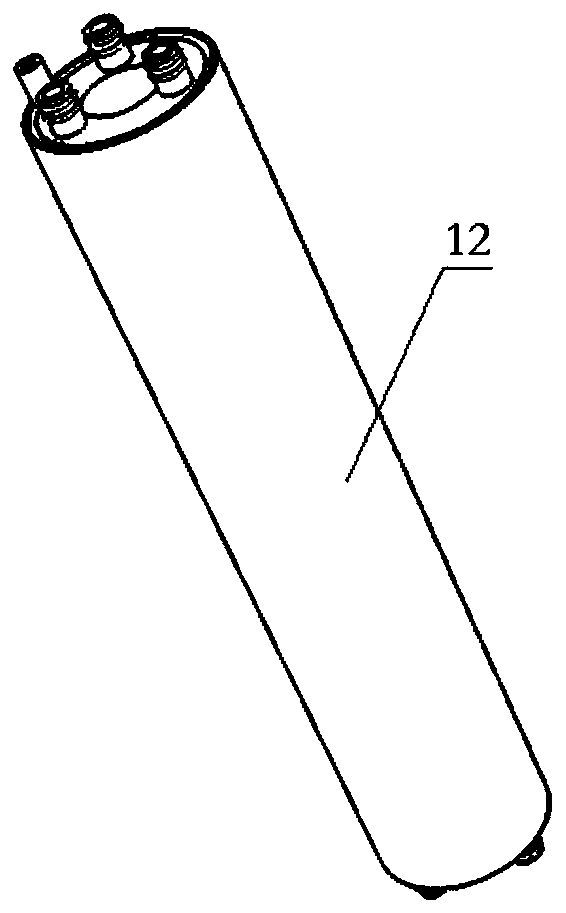
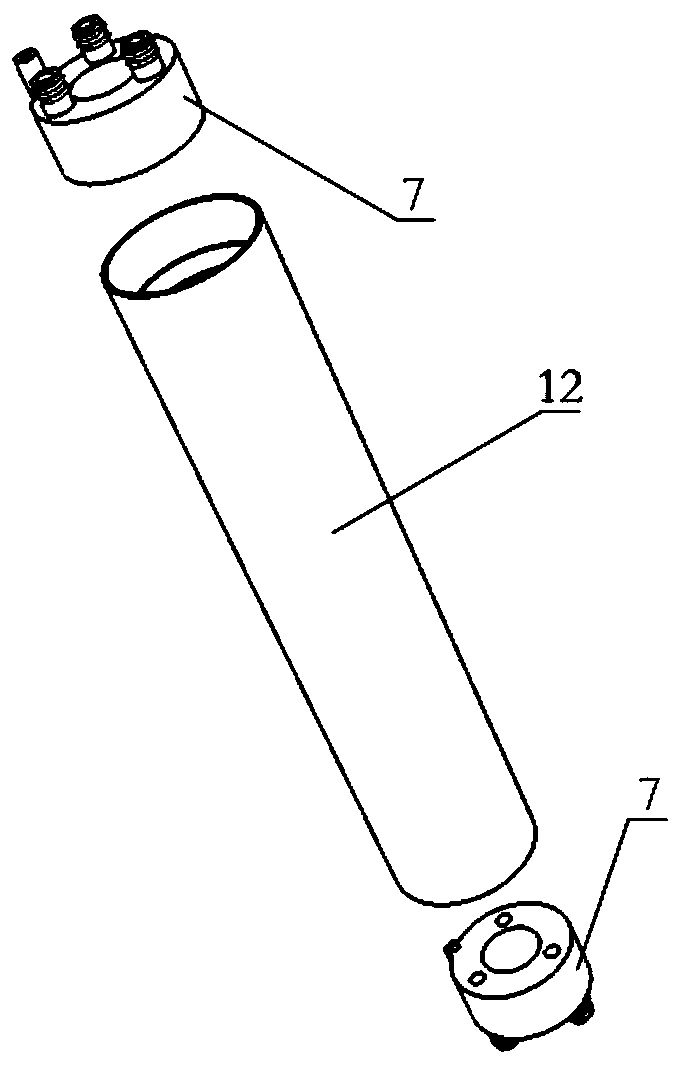
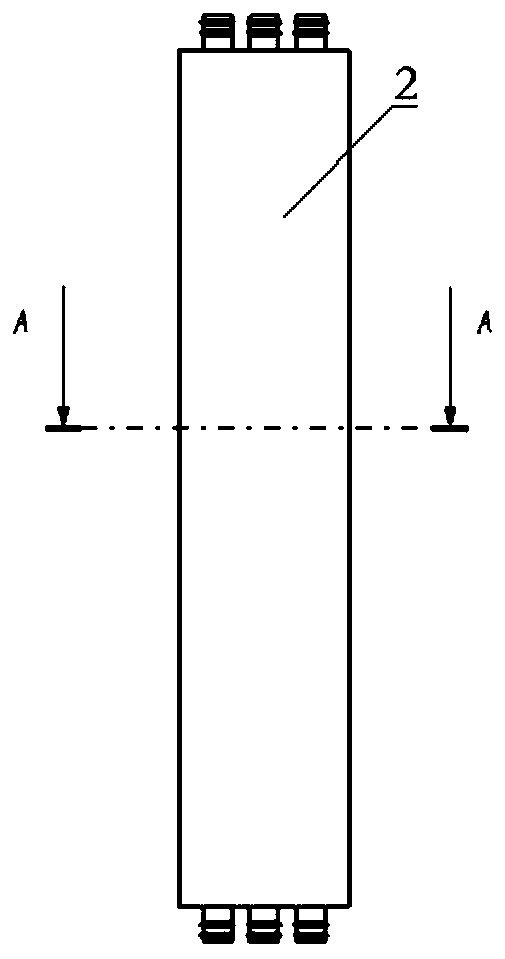
[0040] See Figure 1 to 14 , A multi-degree-of-freedom variable stiffness pneumatic surgical operating arm, comprising several identical pneumatic driver units connected together. The pneumatic driver unit includes a cylindrical driver. The two ends of the driver are connected with a base 7 and the driver includes an external stiffness adjustment layer. 2. The rigidity adjustment layer 2 is provided with a driving layer 1 inside. The driving layer 1 includes a circular cylindrical silicone rubber layer 3 with a through hole 10. The silicone rubber layer 3 is provided with several cavities 4, and the inner surface of the silicone rubber layer 3 is covered There is a PDMS layer 5, the outer surface of the silicone rubber layer 3 is covered with a double helix nylon fiber 6, and the base 7 is provided with an air hole 8 corresponding to the cavity 4, and a vacuum port 13 corresponding to...
PUM
| Property | Measurement | Unit |
|---|---|---|
| diameter | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com