Space rope system robot vision accurate approach method
A robot vision and space tethering technology, which is applied in the aerospace field, can solve the problems of no distance measurement and the limitation of relative distance measurement, and achieve the effect of accurately approaching the target and real-time precise positioning.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
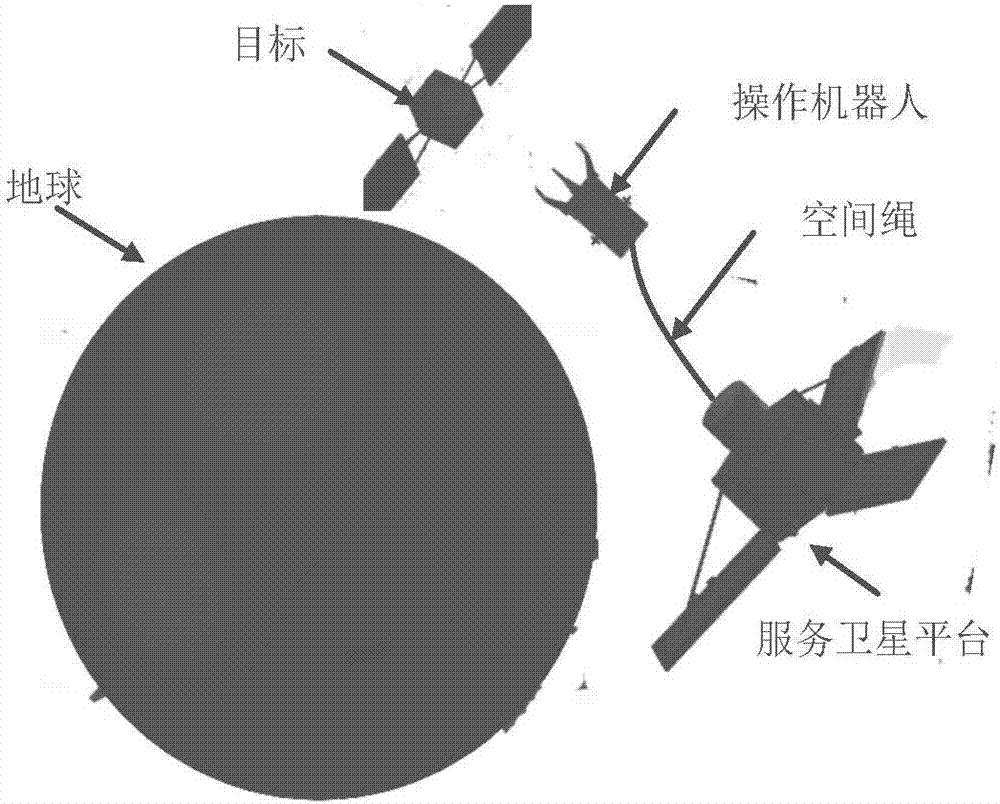
[0069] figure 1 It is the system diagram of the space tethered robot. The system consists of a satellite platform, a tether, and an operating robot. The target is located in front of the system. The satellite platform is a satellite with more functions, larger mass and volume. When the satellite platform approaches the target to a certain distance, it can launch the operating robot to approach and capture the target. During the flight, the operating robot measures the relative position between it and the target in real time through the monocular camera installed on it, and guides the operating robot to perform correct approach maneuvers.
[0070] Figure 5 It is the feedback structure diagram of the control system. Firstly, according to the angle information of the target relative to the manipulating robot, the relative position of the space manipulating robot and the target is estimated using the EKF method. Then the estimated value obtained by EKF is fed back to the mod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com