

Method for planning smooth joint space trajectory of robot
A robot joint and space smoothing technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., to achieve real-time calculations, real-time online planning, and wide applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0048] The present invention will be further described in detail below with reference to the embodiments and accompanying drawings, but the embodiments of the present invention are not limited thereto.
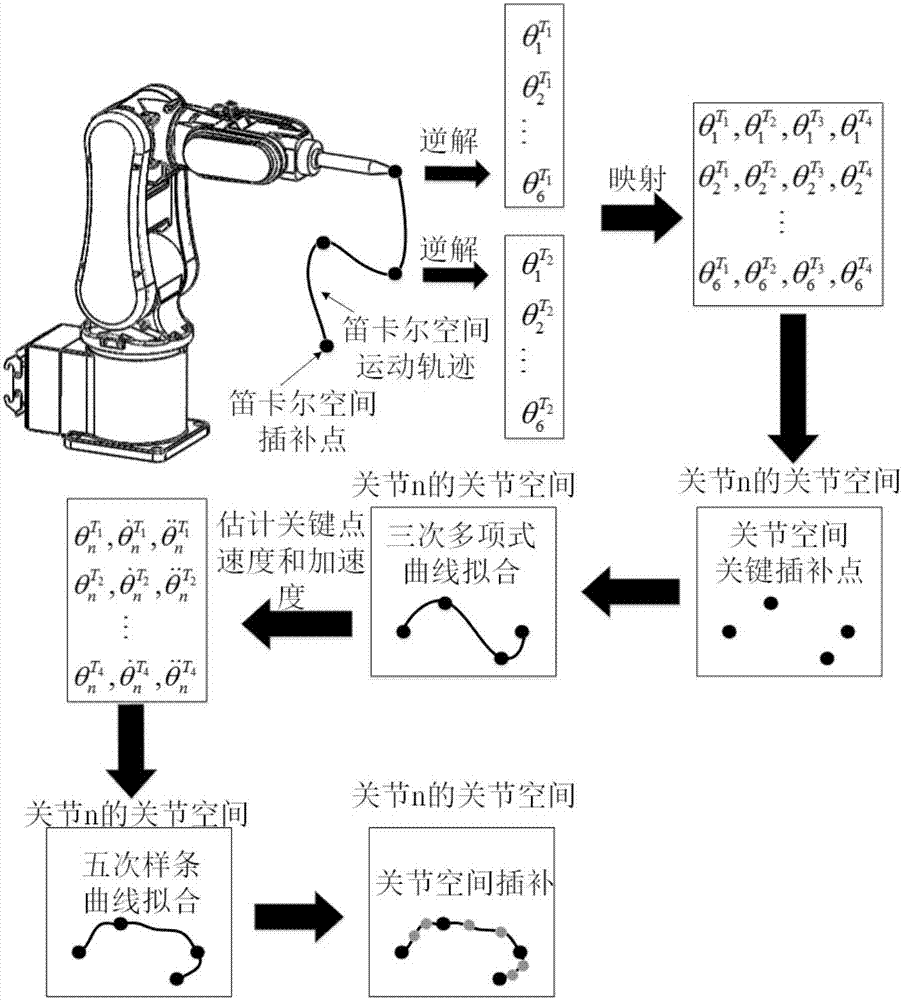
[0049] Such as figure 1 As shown in , taking a six-DOF vertical joint series robot as an object, the robot joint space smooth trajectory planning is carried out according to the following steps:
[0050] A method for robot joint space smooth trajectory planning, comprising steps:
[0051] S1. Using the robot kinematics inverse solution algorithm, the mapping of the robot's Cartesian space motion trajectory to the joint space motion trajectory is realized, and the key interpolation points of the joint space are obtained;
[0052] S2. Adjust the Cartesian interpolation cycle according to the maximum speed constraints of each joint of the robot;
[0053] S3. Estimating the angular velocity and angular acceleration of the key interpolation points in the joint space by means of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More