Real-time posture measuring method for motion capture system oriented to four-rotor aircraft
A four-rotor aircraft, motion capture technology, applied in the direction of navigation calculation tools, etc., can solve the problem of inaccurate real-time attitude measurement, and achieve the effect of improving the measurement accuracy of attitude angle, strong practicability, and high accuracy of attitude measurement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
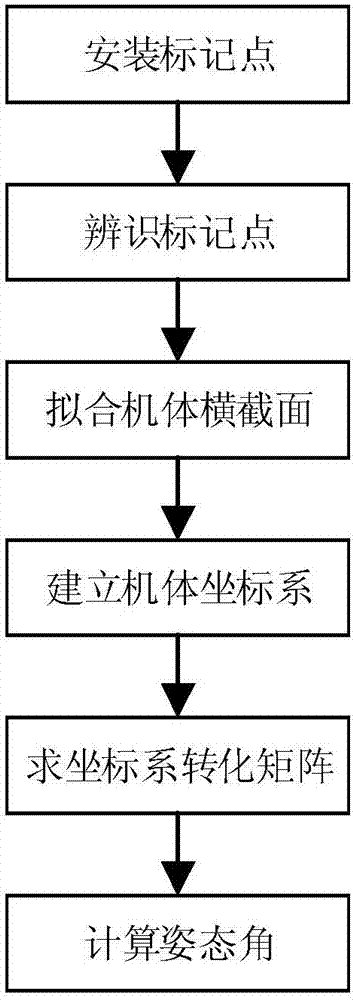
Method used
Image

Examples
Embodiment
[0060] In the form of experiments, the attitude measurement accuracy and real-time measurement after the method of the present invention are verified through indoor static and dynamic experiments.
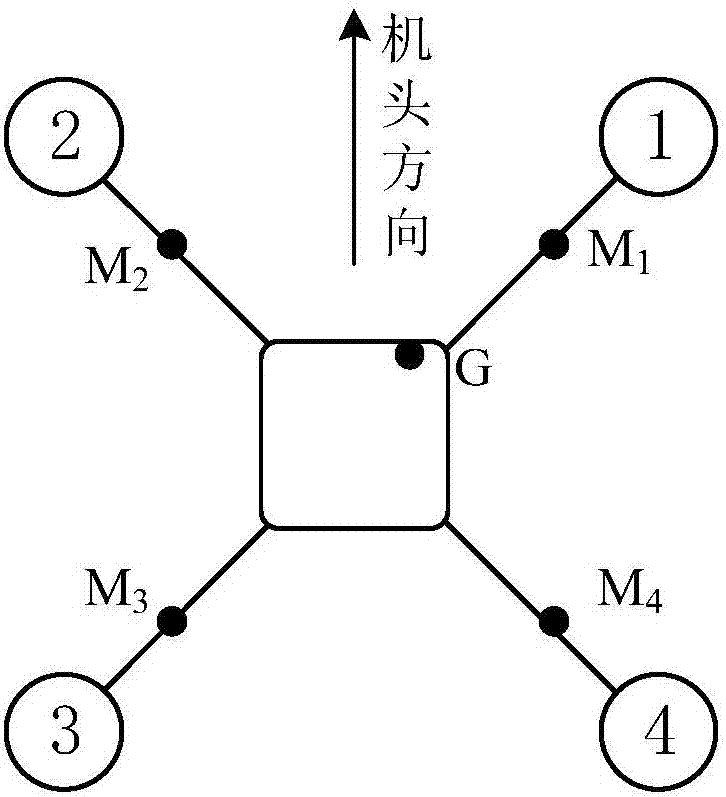
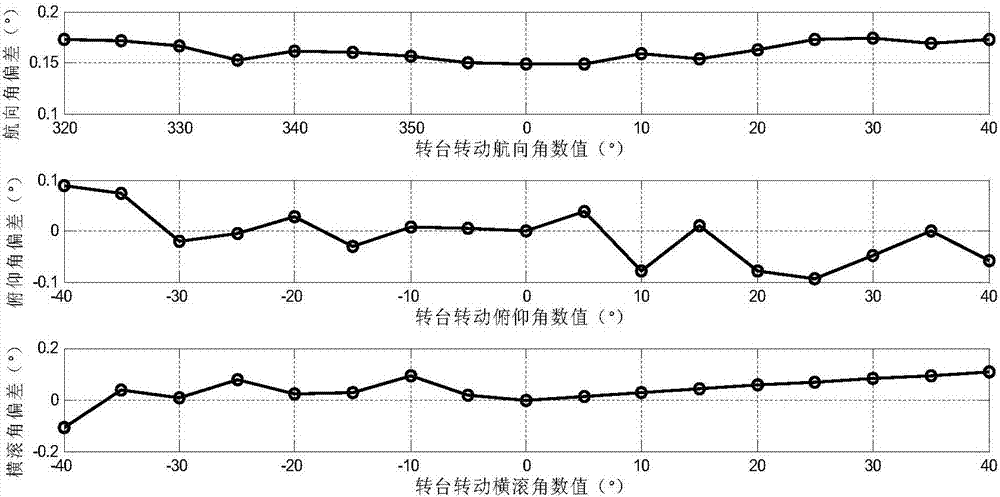
[0061] In the static experiment, the marker points are installed on the turntable plane of the three-axis small mechanical turntable, and the change of the attitude angle of the quadrotor aircraft is simulated by the change of the turntable plane (equivalent to the XOY plane of the machine system). image 3 It is a schematic diagram of the attitude measurement error, and Table 1 is the root mean square error (RMSE) of the attitude measurement, where the reference datum is the attitude angle of the turntable rotation. It can be seen that the attitude measurement error is less than 0.2 degrees, and the attitude measurement error of the pitch angle is less than 0.1 degree, which can meet the indoor flight requirements of the quadrotor aircraft.
[0062] Table 1
[0063] Hea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



