Route programming method and device for intelligent robot
An intelligent robot and path planning technology, applied in the field of intelligent robots, can solve problems such as poor stability and lack of open source code, and achieve the effect of improving stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
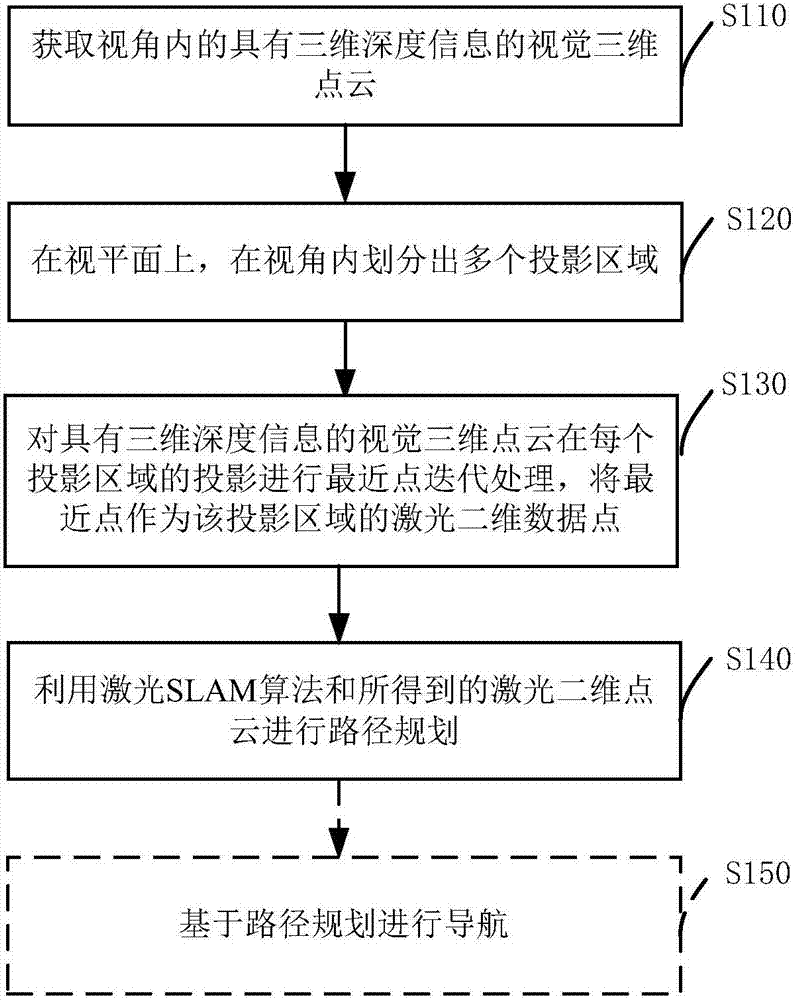
[0030] figure 1 It is a schematic flowchart of Example 1 of the path planning method for an intelligent robot according to the present invention. The intelligent robot is preferably a robot installed with a robot operating system. The method in this embodiment mainly includes the following steps.
[0031] In step S110, a visual three-dimensional point cloud with three-dimensional depth information within a viewing angle is acquired.
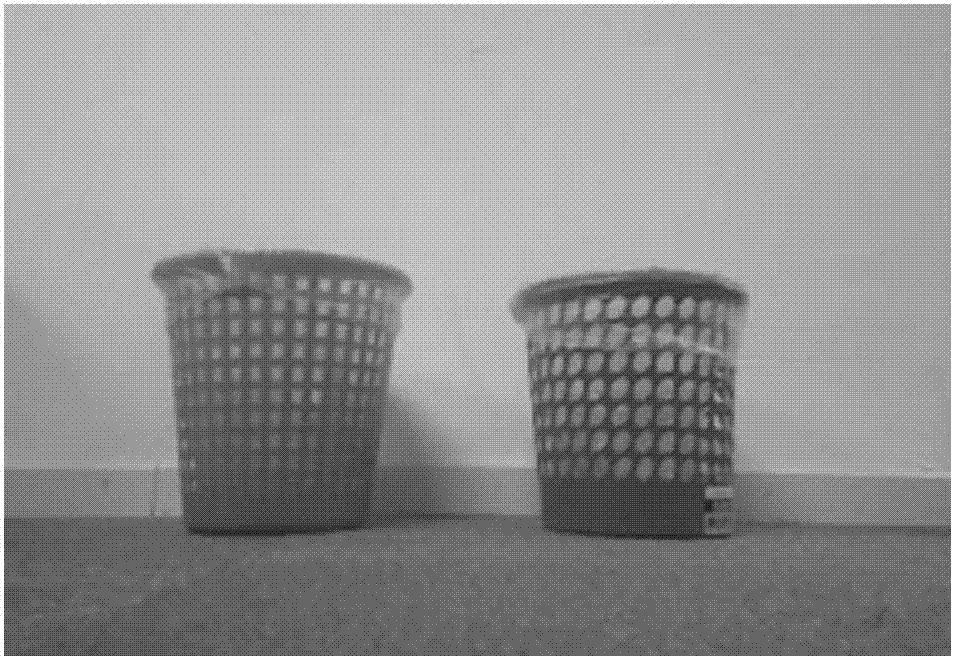
[0032] Specifically, the intelligent robot adopts a high-definition depth camera and uses structured light to perceive the scene in the viewing angle in real time (such as image 3 shown) and form a depth map image. Each pixel in the depth map image records the depth value of the scene, which is completely different from the light intensity value represented by the pixel in the ordinary RGB image. In addition, the depth camera can directly convert the collected depth map image into a visual 3D point cloud (such as Figure 4 As shown), it can a...
no. 2 example
[0044] Figure 6 It is a structural block diagram of a path planning device 600 for an intelligent robot according to an embodiment of the present application. Such as Figure 6 As shown, the path planning device 600 of the embodiment of the present application mainly includes: a visual 3D point cloud acquisition module 610 , a projection area division module 620 , a laser 2D point cloud acquisition module 630 , a path planning module 640 and a navigation module 650 .
[0045] A visual 3D point cloud acquisition module 610, which acquires a visual 3D point cloud with 3D depth information within a viewing angle. Further, the visual 3D point cloud acquisition module 610 also performs filtering and / or smoothing processing on the acquired visual 3D point cloud data to restore lost depth data.
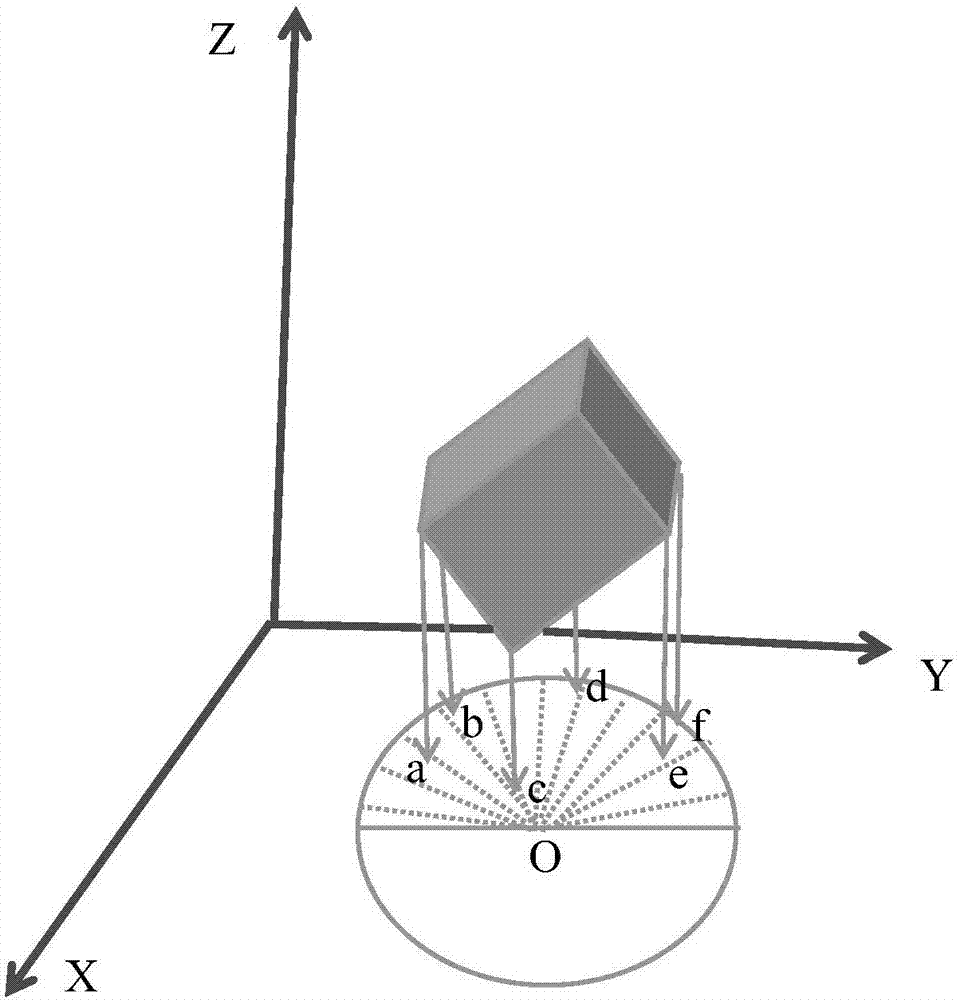
[0046] The projection area division module 620 divides a plurality of projection areas within the viewing angle on the viewing plane. The projection area division module 620 further divi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More