

Swarm path planning method based on variable dimension ABC algorithm
A group path and path planning technology, which is applied in the direction of calculation, calculation models, instruments, etc., to achieve the effect of safely avoiding obstacles and improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The present invention is described in detail below in conjunction with accompanying drawing:
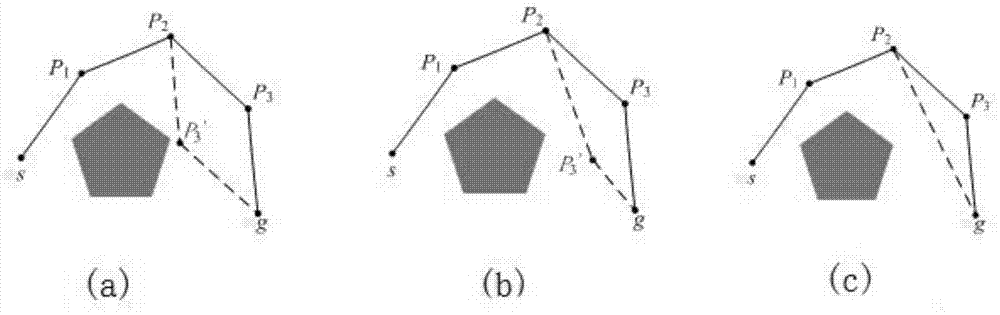
[0014] The bee colony algorithm has good flexibility, versatility and robustness in solving optimization problems, but the dimension of its solution is certain, which is difficult to satisfy in solving multi-path or swarm system path network optimization problems. Require. In the endpoint heuristic path generation method, the number of navigation points is the dimension of the solution, and the distance between path points is the length r of a single route segment. If the number of navigation points (dimension of the solution) and r are both fixed, it is difficult to obtain a smooth path just by changing the position of the navigation points for route optimization, such as figure 1 (a), s-P 1 -P 2 -P 3 -g is the initialization path, s-P 1 -P 2 -P 3 -g is the optimized path; if the number of waypoints remains unchanged, change the size of r as follows figure 1 As shown ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More