

Unmanned aerial vehicle obstacle avoidance method
A drone and obstacle avoidance technology, applied in the field of drones, can solve problems such as large amount of calculation, failure to consider the constraints of drone dynamics performance, lack of consideration of drone dynamics constraints and flight envelope requirements, etc., to achieve Improve practicality, avoid the problem of local obstacle traps, and satisfy the effect of dynamic performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific examples. However, it can be understood that the following specific embodiments are only preferred technical solutions of the present invention, and should not be construed as limiting the present invention.
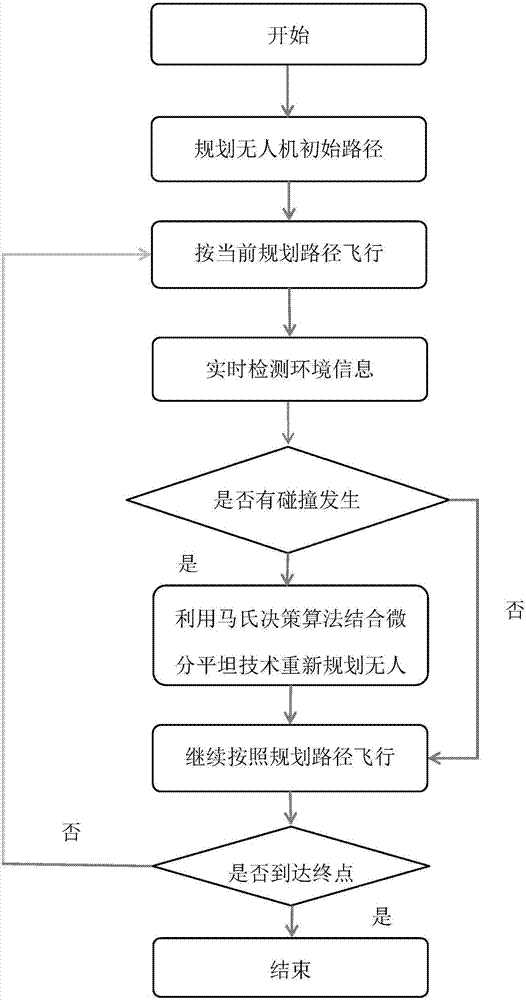
[0029] Such as figure 1 Shown, a UAV obstacle avoidance method, this obstacle avoidance method mainly includes the following steps:
[0030] Step 1. The UAV plans an initial flight path to the destination. The UAV starts from the starting point and starts along the initial planned path.
[0031] Step 2: Use the sensor to detect the position and speed information of the UAV and the obstacles within 800m of the UAV during the flight of the UAV.
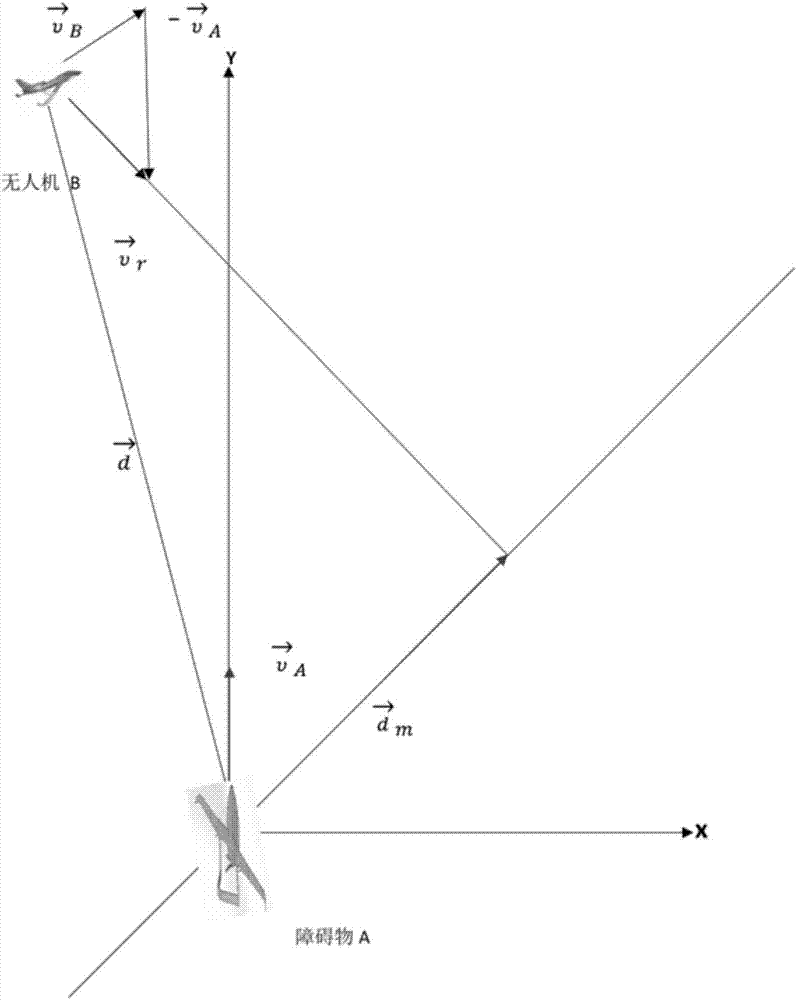
[0032] Such as figure 2 As shown, for the relative motion between the UAV and the obstacle, the onboard sensor is used to detect the UAV velocity vector Obstacle Velocity Vector The relative ve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More