

A multi-axis propulsion water search and rescue robot
A robot and life-saving device technology, applied in the field of intelligent robots, can solve problems such as difficulty in rescue at the drowning site, failure of rescuers to arrive in time, secondary injury of drowning personnel, etc., to ensure fast timeliness, high practicability, and reduce risks Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
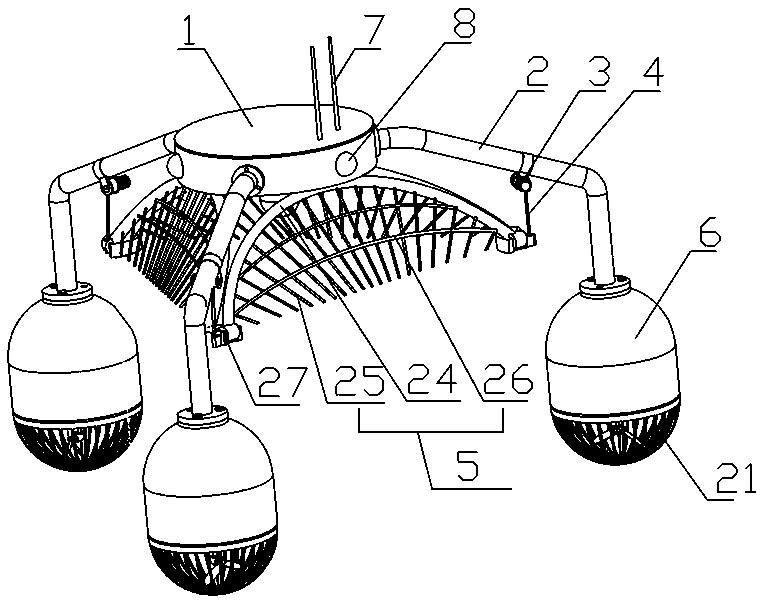
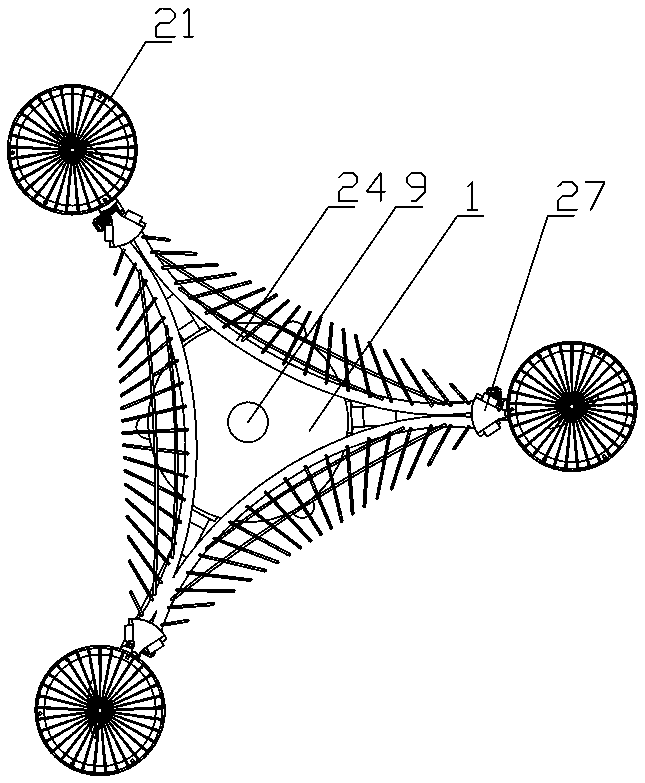
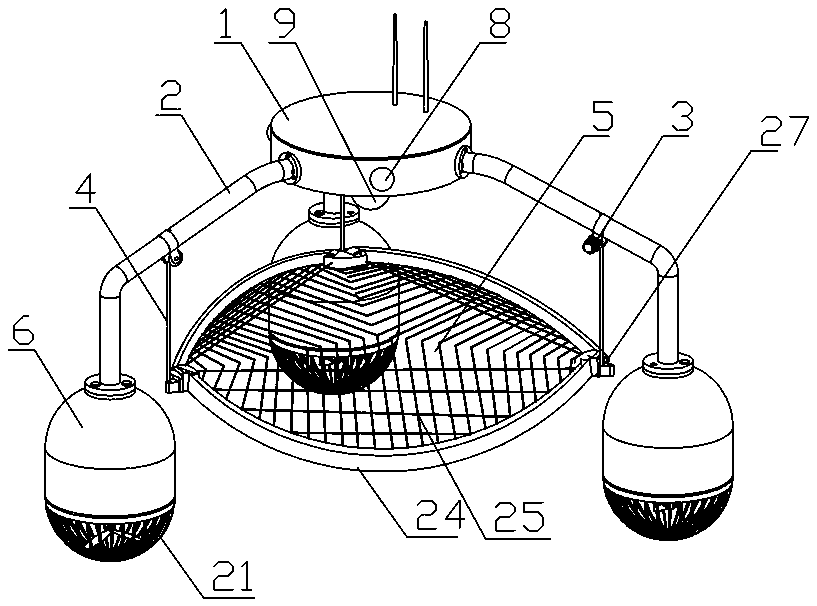
[0036] A multi-axis propulsion type water search and rescue robot has a central control platform 1, at least three brackets 2 are arranged along the circumferential direction of the central control platform 1, each bracket 2 is provided with a lift drive device, and the lift drive device is located in the central control platform. A retractable life-saving device is hoisted below 2, and a power buoy device 6 is also connected and installed at the rear end of each bracket 2. The central control platform 2 is provided with a controller, which is connected to the lifting drive device and the power buoy device 6. communication connection.
[0037]In this embodiment, a multi-axis propulsion type water search and rescue robot is provided, which has a circular central control platform 1, and three bending brackets 2 are evenly spaced along the circumference of the central control platform 1. The tail of the bending bracket 2 The ends are arranged vertically downward, and a power buoy...
Embodiment 2
[0045] A multi-axis propulsion type water search and rescue robot has a central control platform 1, at least three brackets 2 are arranged along the circumferential direction of the central control platform 1, each bracket 2 is provided with a lift drive device, and the lift drive device is located in the central control platform. A retractable life-saving device is hoisted below 2, and a power buoy device 6 is also connected and installed at the rear end of each bracket 2. The central control platform 2 is provided with a controller, which is connected to the lifting drive device and the power buoy device 6. communication connection.
[0046] In this embodiment, a multi-axis propulsion type water search and rescue robot is provided, which has a circular central control platform 1, and three bending brackets 2 are evenly spaced along the circumference of the central control platform 1. The tail of the bending bracket 2 The ends are arranged vertically downward, and a power buo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More