

A trajectory planning method for emergency search and rescue under the coordination mechanism of unmanned aerial vehicles and manned vehicles
A track planning and collaborative mechanism technology, applied in navigation calculation tools, control/regulation systems, non-electric variable control, etc., can solve problems such as low rescue efficiency, poor safety, complex terrain environment, etc., to avoid rescue confusion and improve The effect of efficiency and safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The present invention will be further described in detail below in conjunction with test examples and specific embodiments. However, it should not be understood that the scope of the above subject matter of the present invention is limited to the following embodiments, and all technologies realized based on the content of the present invention belong to the scope of the present invention.
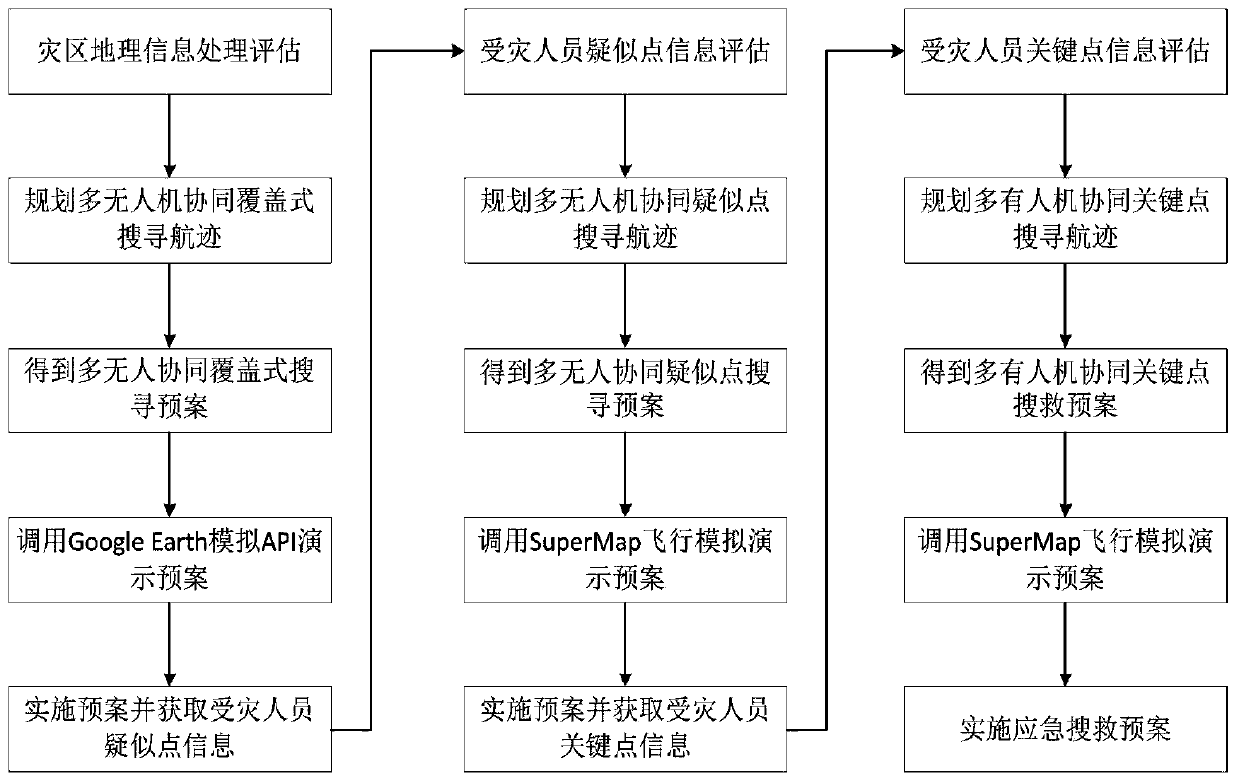
[0066] Such as figure 1 As shown, a multi-machine multi-target emergency search and rescue trajectory planning method under the cooperative mechanism of UAV and man-machine, including the following steps:
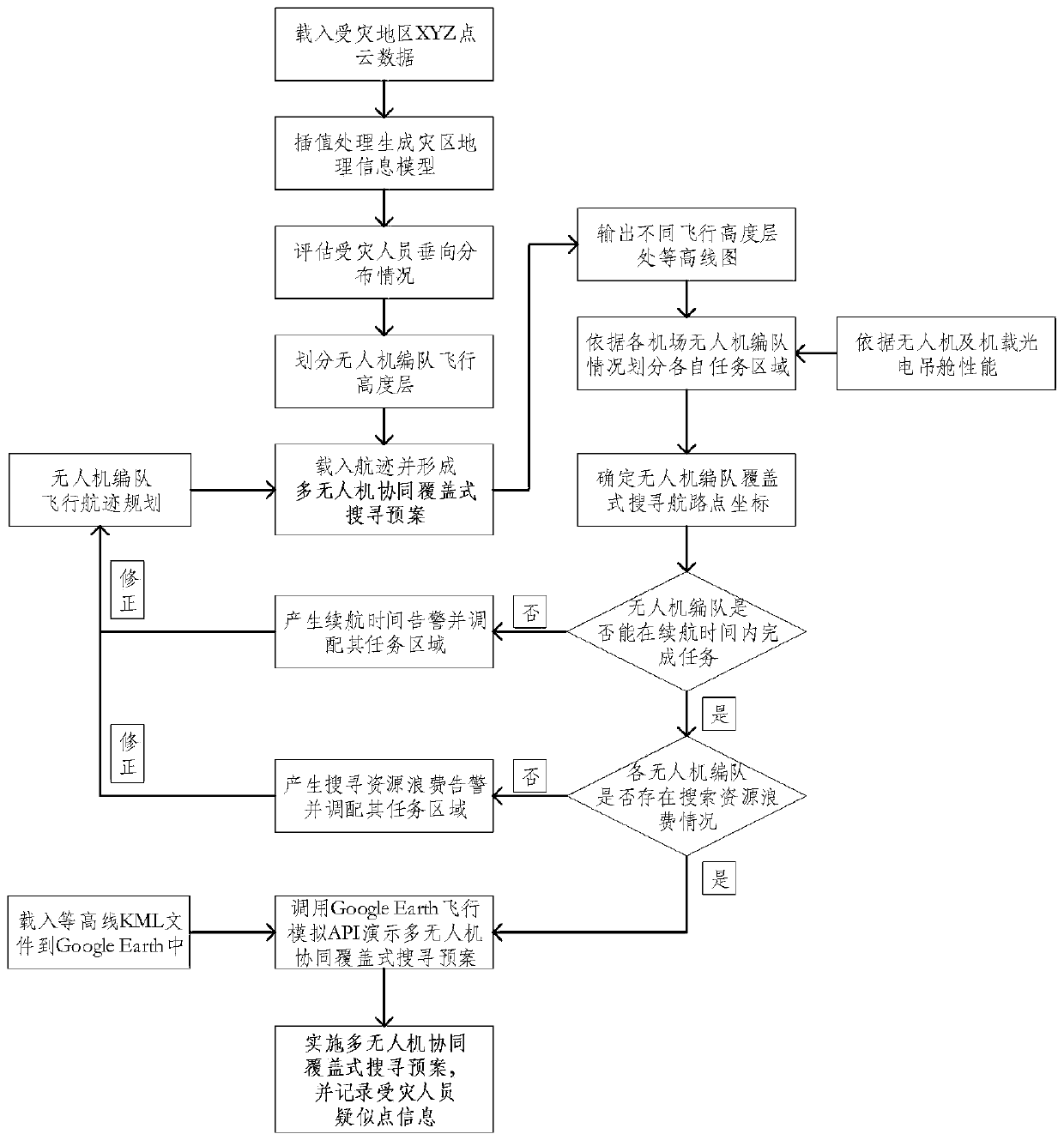
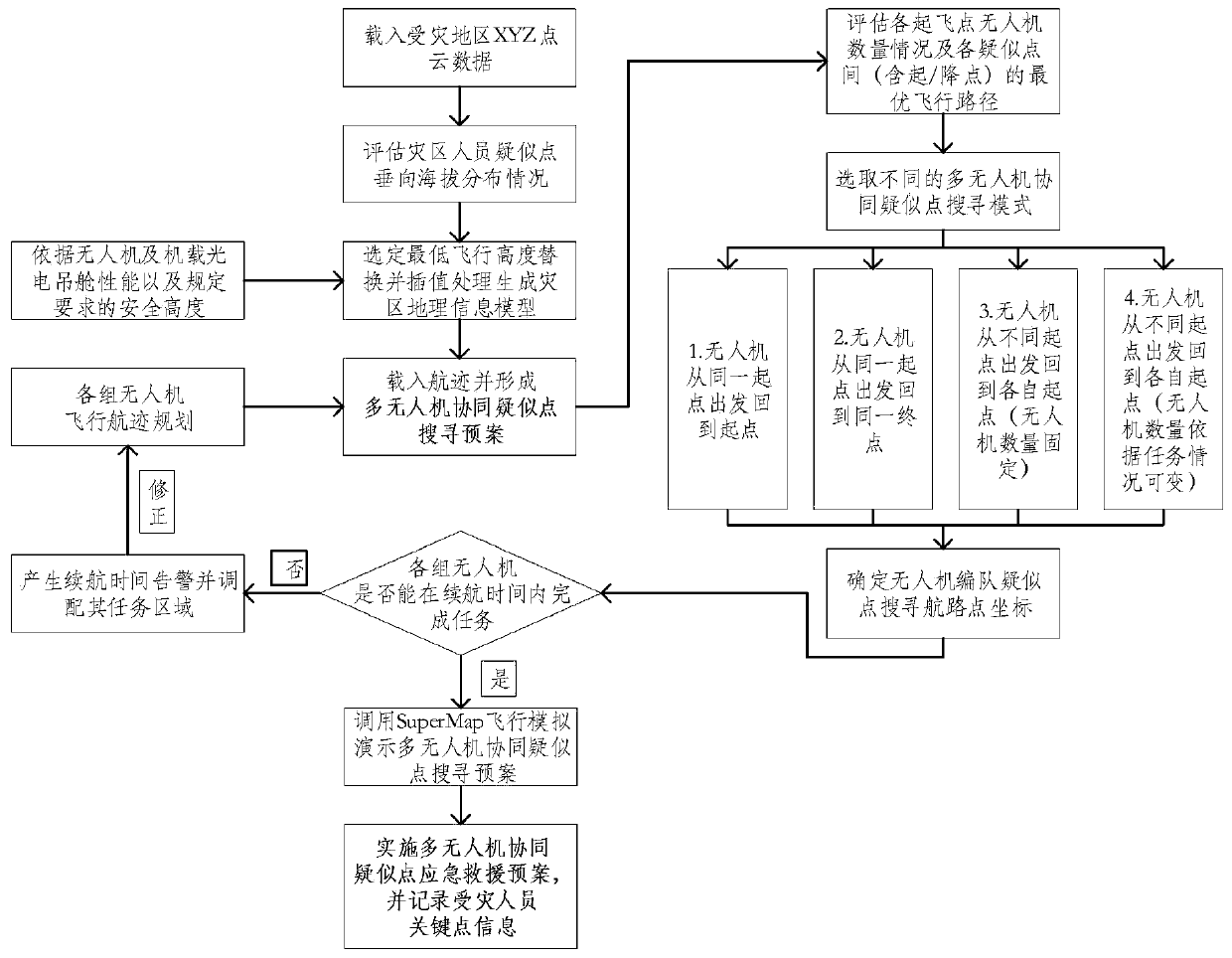
[0067] S1: Obtain and evaluate the geographical information of the disaster-affected area, plan the multi-UAV cooperative coverage search track, thereby obtain the multi-UAV cooperative coverage search plan, and call the Google Earth simulation API to demonstrate the plan, implement multi-unmanned The machine coordinates the coverage search plan, and obtains the geographical loca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More