Control algorithm used for mechanical arm with single-degree-of-freedom flexible terminal
A control algorithm and robotic arm technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of deformation of elastic components, difficulty in precise control of positions, and increase the complexity of control algorithms, so as to simplify complexity and reduce hardware configuration. Requirements, the effect of good force interactive control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The present invention will be described in detail below with reference to the accompanying drawings and examples.
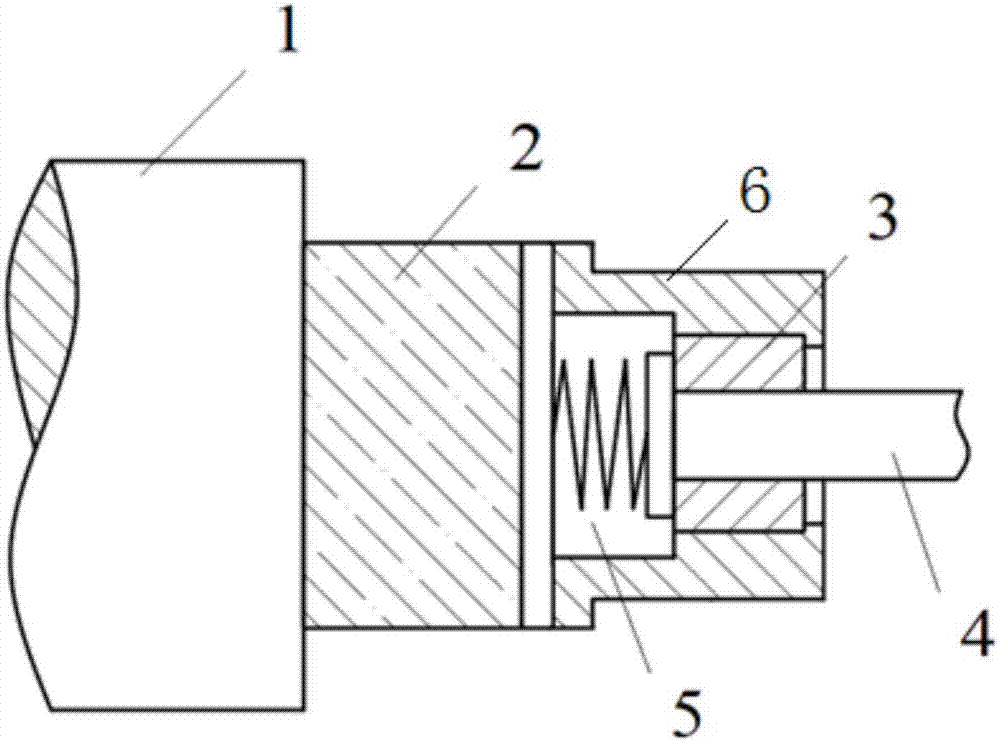
[0060] The invention provides a manipulator control algorithm for a single-degree-of-freedom flexible end, the algorithm is based on a manipulator with a single-degree-of-freedom flexible end, as shown in the attached figure 1 As shown, the end 1 of the mechanical arm is fixedly connected to the force sensor 2, the force sensor 2 is fixedly connected to the bearing sleeve 6, the tool 4 is installed in the bearing sleeve 6 through the linear bearing 3, the tool 4 can only slide along the axial direction of the linear bearing 3, and the spring 5 is installed in the cavity inside the bearing sleeve 6, and the two ends of the spring 5 are in conflict with the tool 4 and the force sensor 2 respectively.
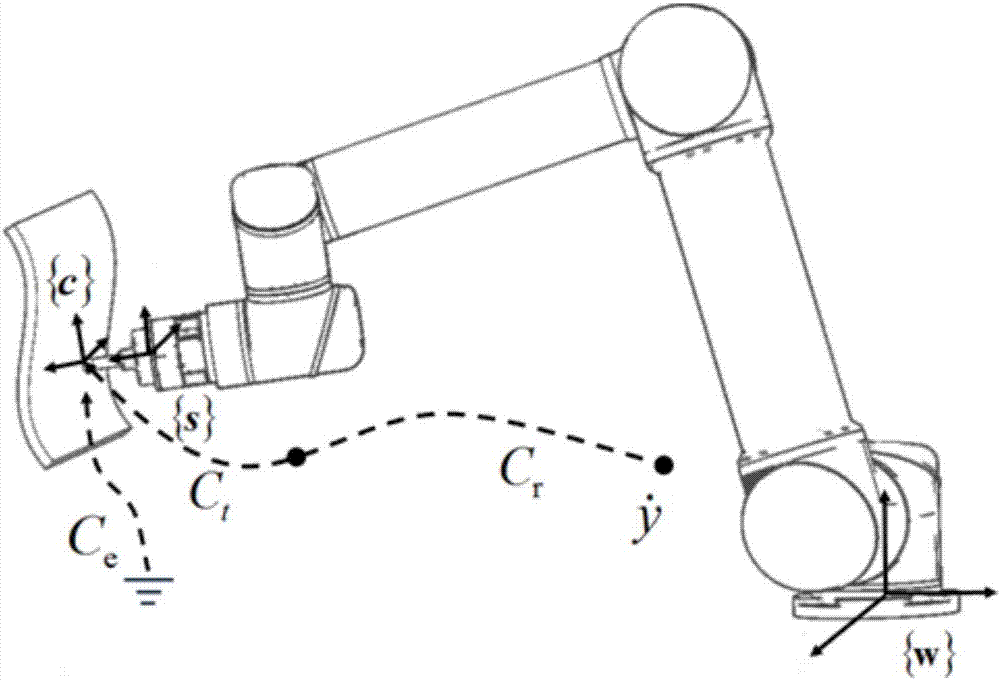
[0061] The control scene of the robotic arm is attached figure 2 As shown, the world coordinate system {W} is established on the base of the manipulator, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com