A Method for Calibrating the Zero Position of Humanoid Robot Joints
A humanoid robot and robot technology, applied in the field of humanoid robots, can solve problems such as high cost, narrow scope of application, complex equipment development technology, etc., and achieve the effects of saving device costs, saving development costs, and reducing human operation errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
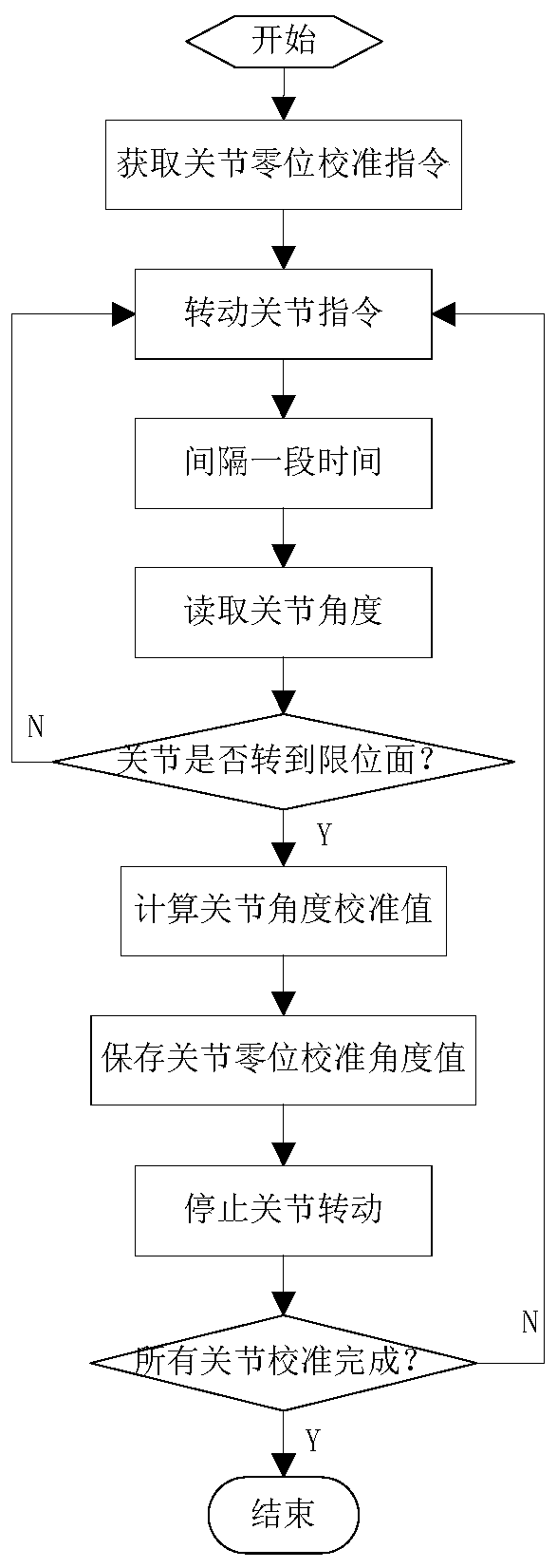
[0026] A method for calibrating the joint zero position of a humanoid robot according to the present invention is carried out in sequence according to the following steps:
[0027] Step 1: Use the PC host computer software and mobile APP to connect to the humanoid robot through a wired or wireless connection, or send a joint zero calibration command to the humanoid robot through voice control, and the humanoid robot control center will enter the zero position. Bit calibration mode, start to calibrate each joint;
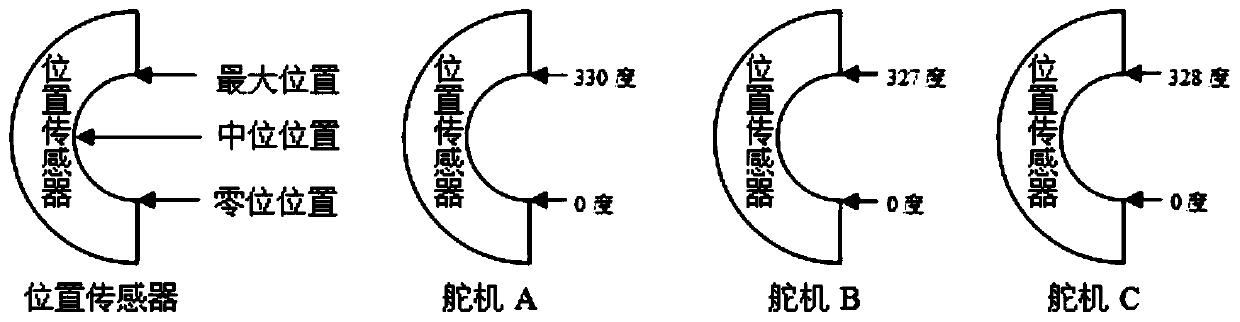
[0028] Step 2: During zero calibration, the humanoid robot control center sends a rotation command to the joint to be calibrated; the robot control center queries the angle of the joint to be calibrated at intervals, and when the joint to be calibrated cannot rotate, it is considered that the joint to be calibrated has rotated When reaching the joint limit surface, the robot control center calculates the zero position error value, saves it, and starts to calibrate th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More