

A three-dimensional shape recognition method for robots based on multi-view information fusion
A technology of three-dimensional shape and recognition method, applied in the field of multi-view visual information, can solve the problems of insufficient information, large limitations, low classification and recognition accuracy, etc., and achieve the effect of high recognition accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] Embodiments of the present invention are described in detail below, and the embodiments are exemplary and intended to explain the present invention, but should not be construed as limiting the present invention.
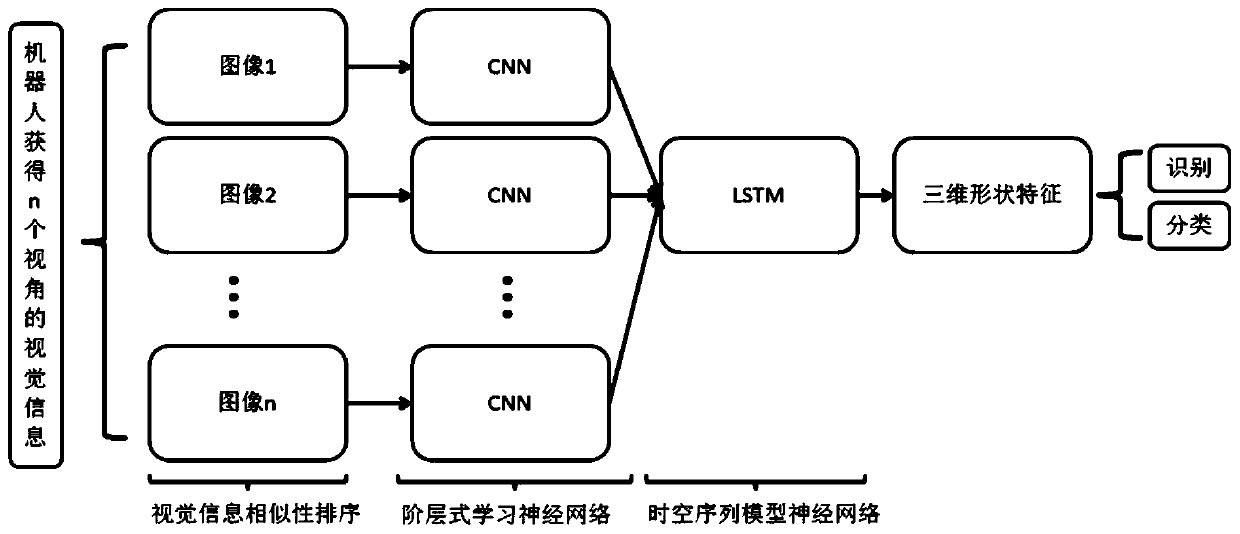
[0036] attached figure 1 The general flow of the recognition of the three-dimensional shape by the robot realized by the present invention is shown. The purpose of the invention is to enable the robot to realize fast and efficient recognition of three-dimensional shapes during motion. The figure contains the visual map of the three-dimensional shape of the different perspectives obtained by the robot during the movement. In the recognition process, the visual information similarity is first sorted to obtain a set of ordered visual information structures; and then the obtained visual map is convolved. Neural network learning to obtain hierarchical deep features, and then brought into the long short-term memory model to obtain deep features of time-space sequen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More