

A humanoid soccer robot passing control method and team ball control method
The technology of a soccer robot and its control method is applied in indoor games, toys, automatic toys, etc., and can solve the problems of little significance and failure to take into account the cooperation of players, so as to increase the holding time of the ball, improve the success rate of passing the ball, increase the The effect of win percentage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings.
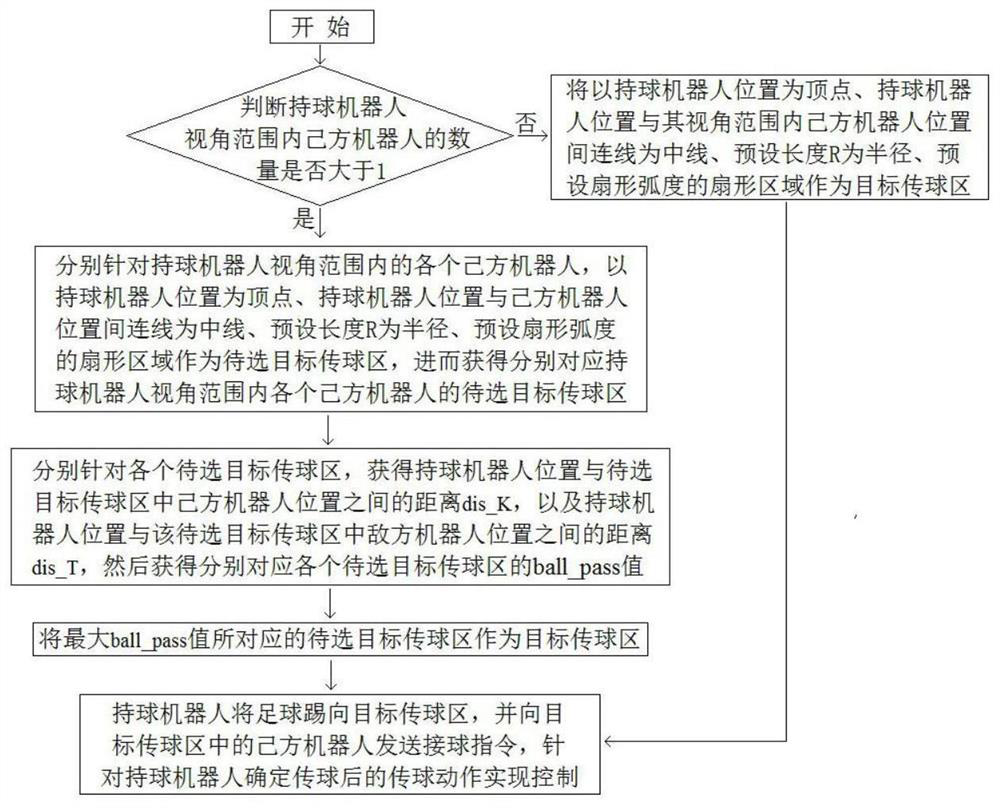
[0048] In the design process of the humanoid soccer robot, in order to use the KeepAway training model on the RoboCup3D simulation platform to train effective passing tactics, it is necessary to improve the training model and learning algorithm. According to the KeepAway training idea and with reference to the training model in the RoboCup2D simulation platform, the present invention designs a humanoid soccer robot passing control method, which controls the passing action after the ball-holding robot determines the passing. In practical applications, Such as figure 1 As shown, it specifically includes the following steps:
[0049] Step 001. Determine whether the number of own robots within the view range of the robot holding the ball is greater than 1, if yes, go to step 003; otherwise, go to step 002.
[0050] Step 002....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More