

Automobile transverse and longitudinal collision avoidance active coordinating system and coordination method thereof
A coordination method, a horizontal and vertical technology, applied in the vehicle horizontal and vertical active coordination collision avoidance system and its coordination field, can solve the problems of overall time lag, increase the calculation process, collision avoidance efficiency and safety performance reduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0062] Below in conjunction with accompanying drawing, technical scheme of the present invention is described in further detail:
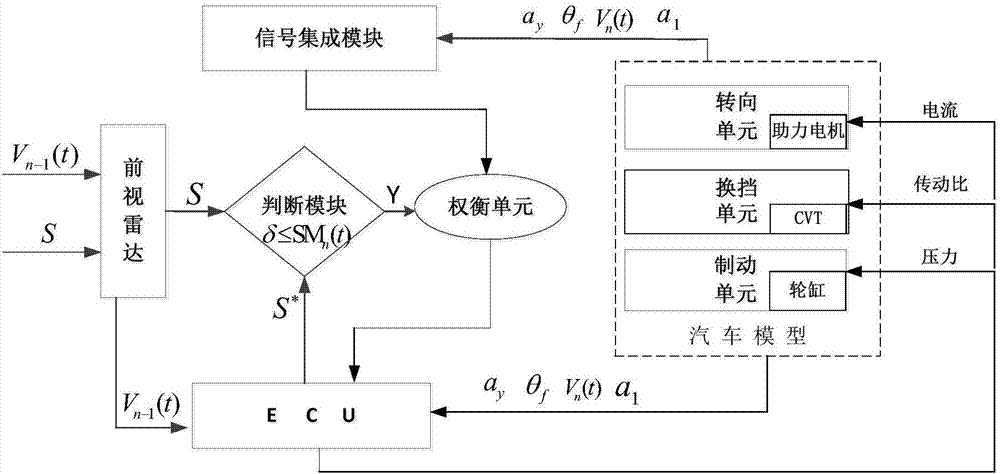
[0063] Such as figure 1 As shown, the present invention discloses a vehicle horizontal and vertical active coordinated collision avoidance system, including a forward-looking radar, a vehicle speed sensor, a lateral acceleration sensor, a longitudinal acceleration sensor, a front wheel angle sensor, a judging module, a signal integration module, a weighing unit, Steering unit, brake unit, shift unit and electronic control unit ECU;
[0064] The signal integration module is connected to the vehicle speed sensor, lateral acceleration sensor, longitudinal acceleration sensor, front wheel angle sensor, and weighing unit respectively; the electronic control unit ECU is respectively connected to the vehicle speed sensor, lateral acceleration sensor, longitudinal acceleration sensor, front wheel A rotation angle sensor, a forward-looking radar, a judging...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More