

Design method of linear quadratic Gaussian (LQG) controller used for vehicle rolling motion safety of active suspension
A linear quadratic, active suspension technology, applied in general control systems, adaptive control, control/regulation systems, etc., can solve problems such as the inability of the controller to work
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the drawings in the embodiments of the present invention.
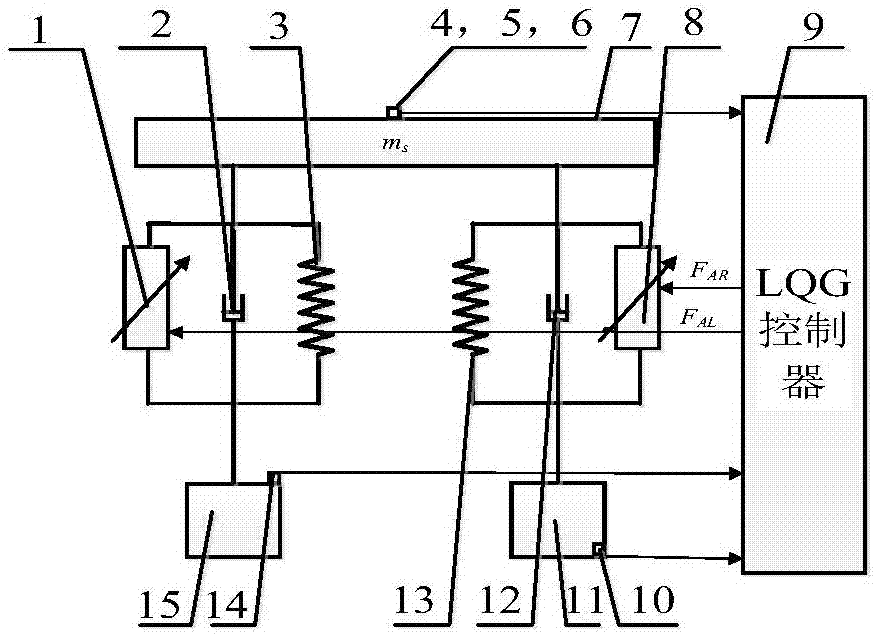
[0038] figure 1 For: the 1 / 2 vehicle three-degree-of-freedom vehicle active suspension system applied in the present invention is: in the vertical direction, the left wheel 15 and the right wheel 11 are located below the sprung mass 7 . A left suspension spring 3, a left suspension damper 2 and a left suspension control force generator 1 are connected in parallel between the left wheel 15 and the sprung mass 7. Between the right wheel 11 and the sprung mass 7, a right suspension spring 13, a right suspension damper 12 and a right suspension control force generator 8 are connected in parallel. When the vehicle turns and moves, due to the lateral acceleration generated by the inertial force, the body rolls and the suspension deforms. A front wheel angle sensor 4 , a roll angle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More