

Double-pendulum crane energy consumption optimal trajectory planning method
A trajectory planning, crane technology, applied in the direction of load hanging components, transportation and packaging, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0147] 1. Description of experimental steps
[0148] Section 1.1. Constructing an optimization problem based on state quantity constraints
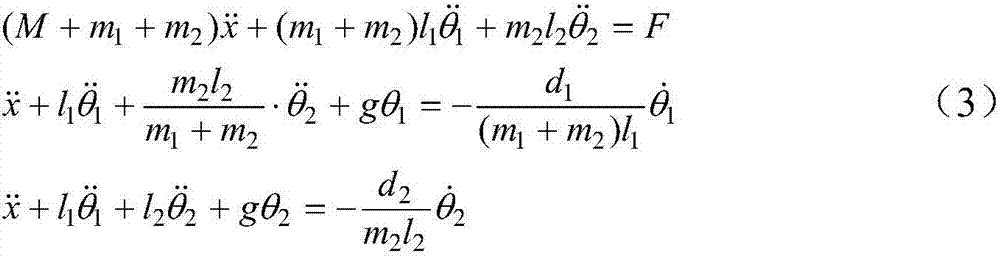
[0149] According to the control objectives of the positioning and swing elimination of the double-pendulum crane system, considering the initial state, target state and state constraints of the system, the optimization problem with system energy consumption as the cost function is constructed as follows:
[0150]
[0151] Among them, min means to minimize, and subject to is followed by constraints that need to be considered. J is the total energy consumption during system operation, and its specific expression is shown in formula (10). is the state vector of the double pendulum crane system, the symbol Indicates matrix / vector transposition, x is the trolley displacement of the double pendulum crane system, is the trolley speed, is the acceleration of the trolley, θ 1 is the swing angle of the hook, θ 2 is the swing angle of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More