

Multi-infrared based robot obstacle avoidance device, control method thereof, and robot edgewise control method
A control method and robot technology, applied in two-dimensional position/course control, vehicle position/route/height control, non-electric variable control, etc., can solve problems such as inconsistency in infrared reflection, improve robot perception and reduce errors The effect of judging and consistent distance from the wall
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
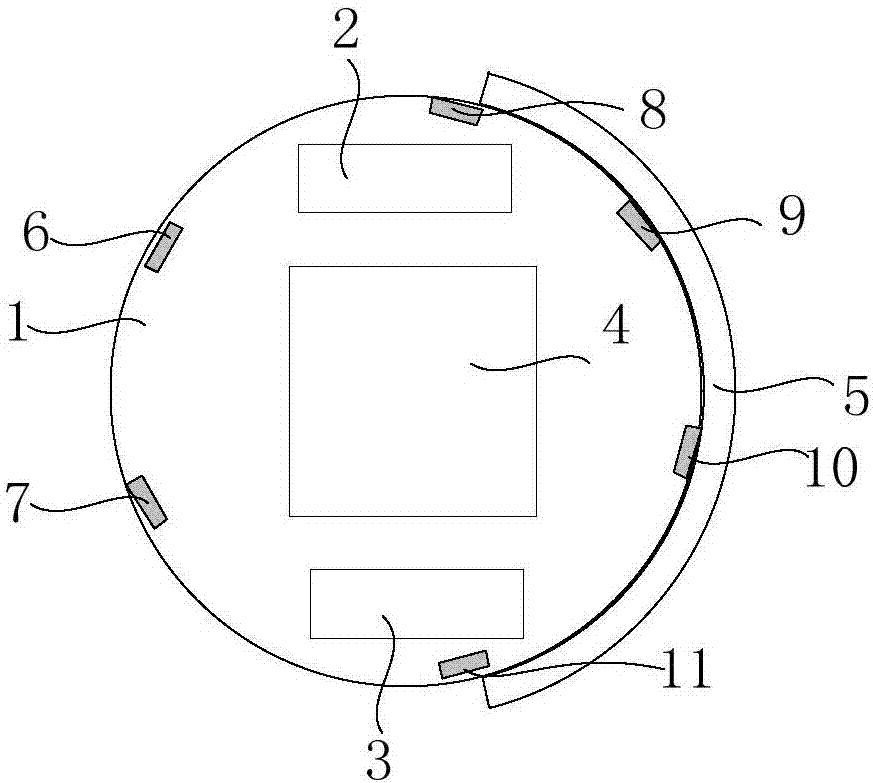
[0036] see figure 1 As shown, the robot based on the present invention includes a body 1, action wheels 2 and 3, a control module 4 and an obstacle avoidance device, wherein the obstacle avoidance device includes a collision detection unit 5 and an anti-fall detection unit 6-11, and the collision detection unit 5 It is arranged at the front end of the robot for collision detection during travel; the anti-fall detection unit 6-11 is arranged at the lower edge of the robot for anti-fall detection of steps and the like. The control module 4 is used for receiving command signals or collecting signals, performing data analysis and processing and generating control signals. The number of obstacle detection and drop detection depends on the needs. Generally, there are 6 groups of obstacle detection, which are distributed in front of the machine, and there are 6 groups of drop detection, which are evenly distributed on the outer circle of the machine. Of course, it is not ruled out t...
Embodiment 2
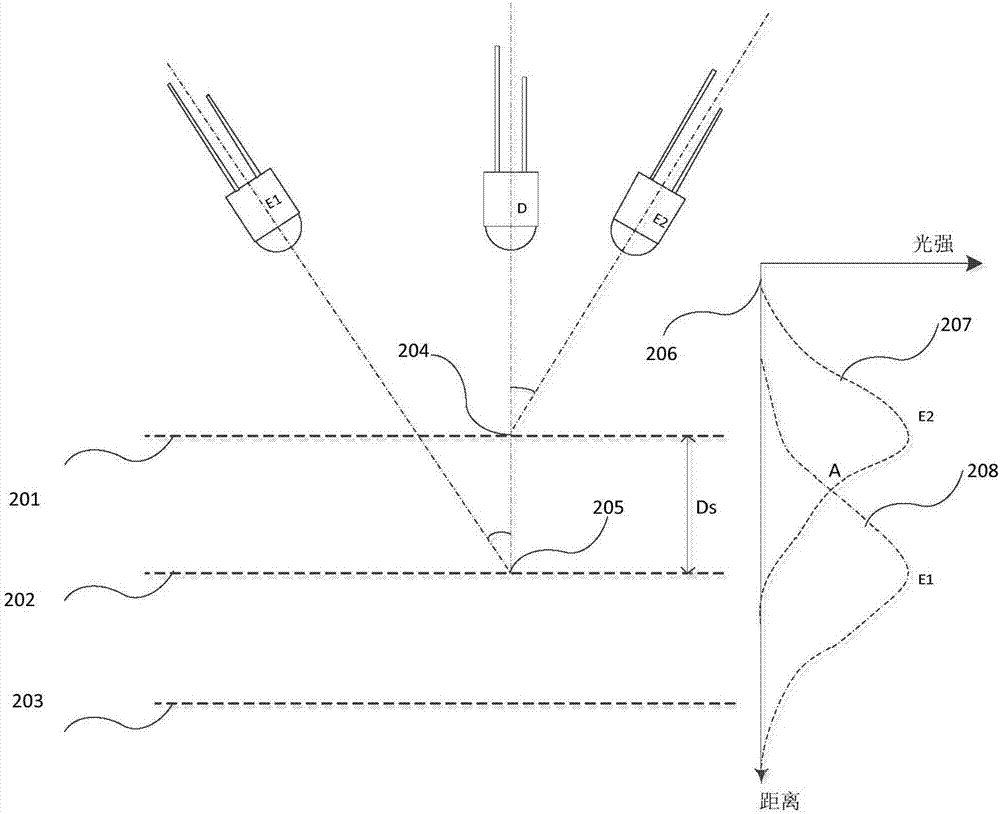
[0053] According to the above principle, multi-infrared detection can also have other structures, such as Figure 8 shown. E1 and E2 do not share one receiving tube, but separate two receiving tubes, and the receiving tube is not perpendicular to the sensing plane. E1 and D1 are paired, and the formed intersection is on the 306 plane; E2 and D2 are paired, and the formed intersection is on the 305 plane. The signal processing method is similar to the method described above.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More