

Multi-objective quantum-behaved particle swarm algorithm-based unmanned aerial vehicle cooperative task distribution method
A technology of quantum particle swarms and task allocation, applied in resource allocation, multi-programming devices, biological neural network models, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example 1
[0286] Example 1: Assume that 4 UAVs perform tasks on 2 targets, and assign tasks to them. According to the permutation and combination knowledge, there are 1620 allocation schemes for this simple problem. Using the exhaustive method to obtain all the allocation schemes and comparing them, it can be obtained that only 5 of the 1620 schemes are non-dominated solutions. It also constitutes the Pareto front end of this problem, and the allocation schemes corresponding to the five solutions are shown in the left half of Table 5. Finally, the algorithm of the present invention also outputs 5 solutions, which are completely consistent with the results obtained by the exhaustive method, as shown in the right half of Table 5. Similarly, when 4 UAVs are fighting against 3 targets, 30,720 solutions are obtained through the exhaustive method, including 13 non-dominated solutions, and the algorithm of the present invention can also find all Pareto front-end solutions. Therefore, the algo...
example 2
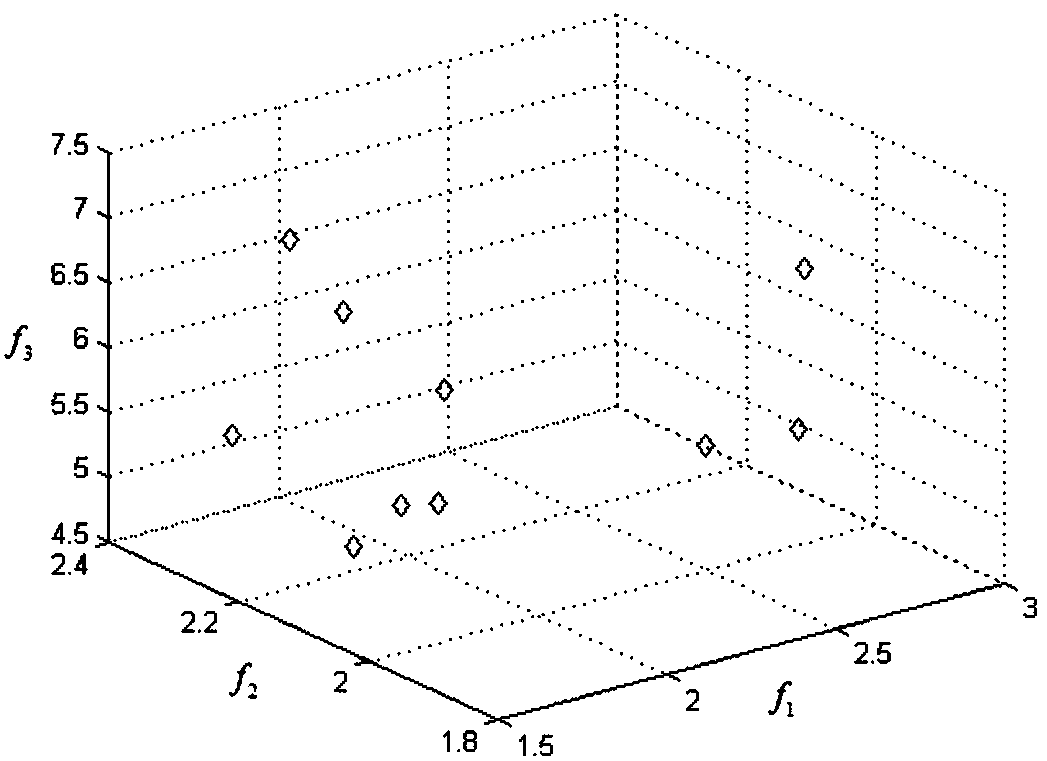
[0289] Example 2: Using the collaborative task assignment method based on the multi-objective quantum particle swarm optimization algorithm to solve the problem of setting task scenarios, the results obtained are as follows: figure 2 , which represents the distribution of non-dominated solutions of the obtained problem in the target space.
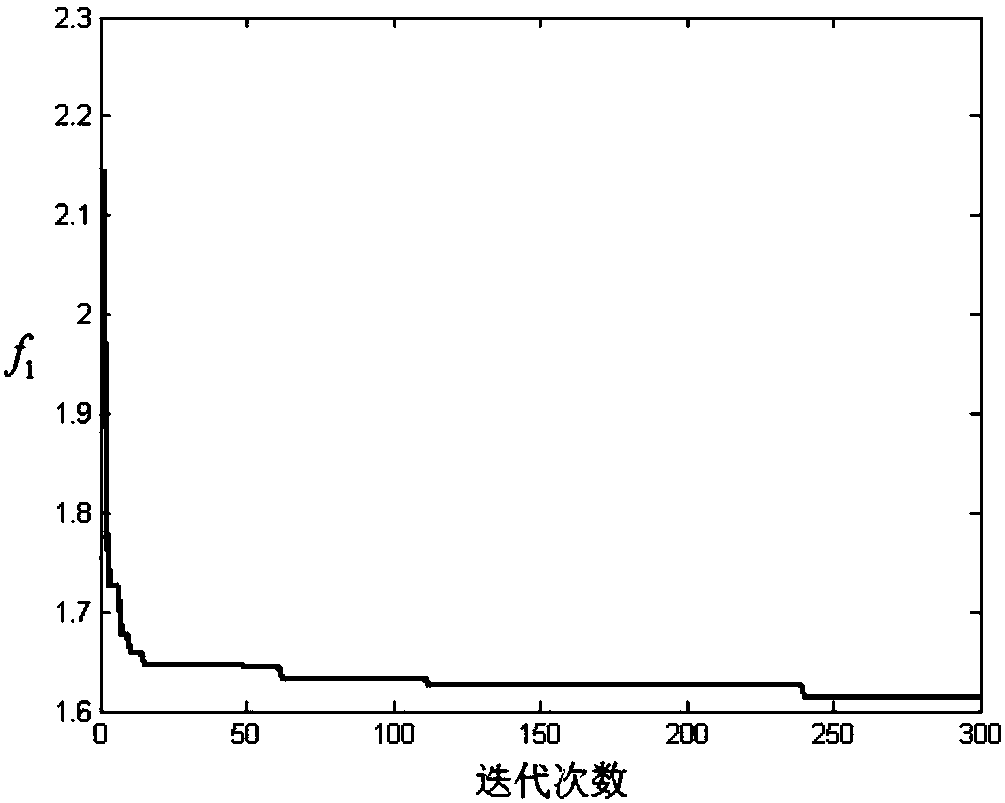
[0290] image 3 , Figure 4 , Figure 5 The iterative graphs of the optimal values of the three objective functions in the update process are given respectively. It can be seen from the figure that with the update and iteration of the particles, the three objective functions are optimized, and finally converge to a stable value, which corresponds to the final optimal solution of the three objective functions. Depend on figure 2 It can be seen that the distribution of non-dominated solutions in the external population output by the algorithm is scattered, and the diversity of the population is guaranteed. Therefore, the algorithm is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More