

Automatic intelligent pulling unmanned aerial vehicle control method and unmanned aerial vehicle
A control method, the technology of drones, applied in the field of drones, can solve the problems of not having too much time to bring pets, unable to accompany pets for a long time, and achieve the effect of preventing pets from running around
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
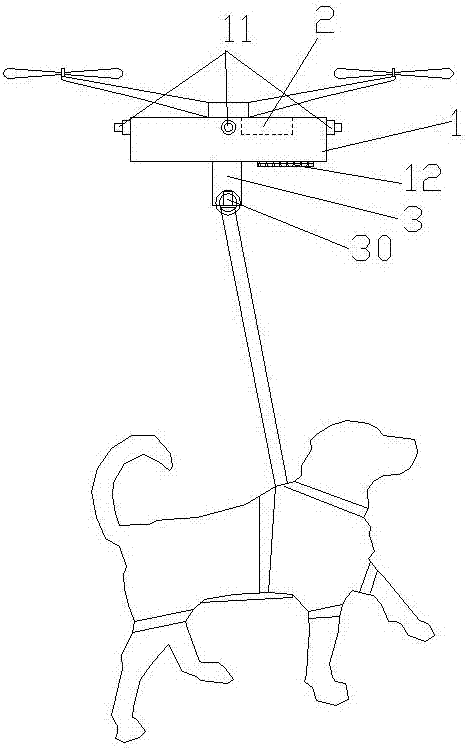
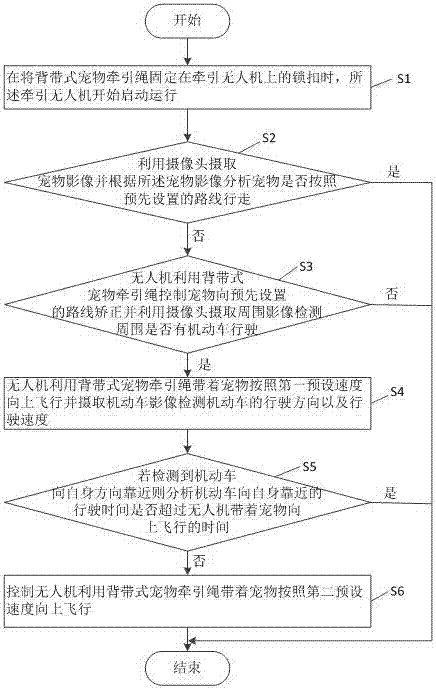
[0059] refer to Figure 1-2 , Figure 7 as shown, figure 1 A schematic diagram of an automated intelligent traction drone provided for one of the examples of the present invention; figure 2 A flowchart of a control method for an automated intelligent traction drone provided by one of the examples of the present invention;
[0060] Figure 7 An architecture diagram of an automated intelligent traction drone provided for one of the examples of the present invention.
[0061] Specifically, this embodiment provides a control method for an automated intelligent traction drone, which is used for traction of pets, including a body 1, a camera 11, a processing device 2, and a lock 3. The method includes:
[0062] S1. When the strap-type pet leash is fixed to the lock 3 on the traction drone, the traction drone starts to run;
[0063] S2. When the traction drone is walking at a preset speed according to a preset route, use the camera 11 installed on the traction drone to capture ...
Embodiment 2
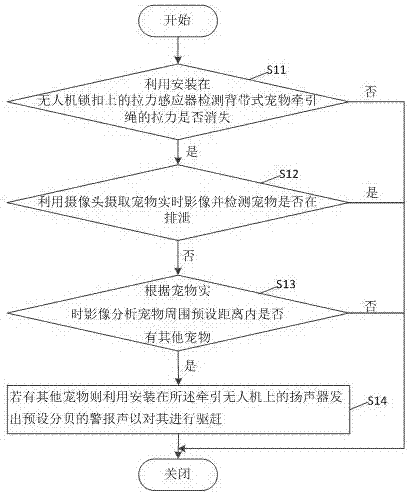
[0071] refer to figure 1 , image 3 , Figure 7 as shown, image 3 A flow chart of sensing a pet stop is provided for one example of the present invention.
[0072] Specifically, this embodiment is basically the same as Embodiment 1, the difference is that in this embodiment, when the traction UAV walks at a preset speed according to a preset route, the method further includes:
[0073] S11. Use the tension sensor 30 installed on the buckle 3 of the traction drone to detect whether the tension of the strap-type pet leash disappears;
[0074] S12. If it disappears, use the camera 11 to capture the real-time video of the pet and detect whether the pet is excreting;
[0075] S13. If there is no excretion, analyze whether there are other pets within the preset distance around the pet according to the real-time image of the pet;
[0076] S14. If there are other pets, use the loudspeaker installed on the traction drone to emit a preset decibel alarm sound to drive them away.
...
Embodiment 3
[0080] refer to figure 1 , Figure 4 , Figure 7 as shown, Figure 4 A flow chart of hovering towed UAV provided for one of the examples of the present invention.
[0081] Specifically, this embodiment is basically the same as Embodiment 2, the difference is that in this embodiment, the camera 11 is used to capture the real-time image of the pet and detect whether the pet is excreting, the method also includes:
[0082] S20. If it is detected that the pet is excreting, control the traction drone to hover directly above the pet and use the tension sensor 30 to detect whether the tension of the strap-type pet leash exists;
[0083] S21. If there is, the traction UAV continues to use the strap-type pet leash to lead the pet to walk at a preset speed according to a preset route.
[0084] Specifically, when the camera 11 is used to capture images of the pet and detect whether the pet is excreting, if it is detected that the pet is excreting, then the traction drone is controlle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More