

Surgical robot system and surgical instrument position display method
A surgical robot and surgical instrument technology, applied in the field of medical devices, can solve the problems of affecting the operation speed, lack of overall sense, affecting the operation speed and operation efficiency, so as to improve the safety and success rate, and reduce the touch of fragile organs The probability of the operation, the effect of improving the operation speed and operation efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] In order to make the purpose, advantages and features of the present invention clearer, the following is attached Figure 1~6 The surgical robot system and the method for displaying the position of surgical instruments proposed in the present invention will be described in further detail. It should be noted that the drawings are in a very simplified form and all use imprecise proportions, which are only used to conveniently and clearly assist in explaining the purpose of the embodiments of the present invention.
[0049] As in the description and claims, the "end" and "distal" refer to the end far away from the operator of the medical device, and the "proximal end" refers to the end close to the operator of the medical device
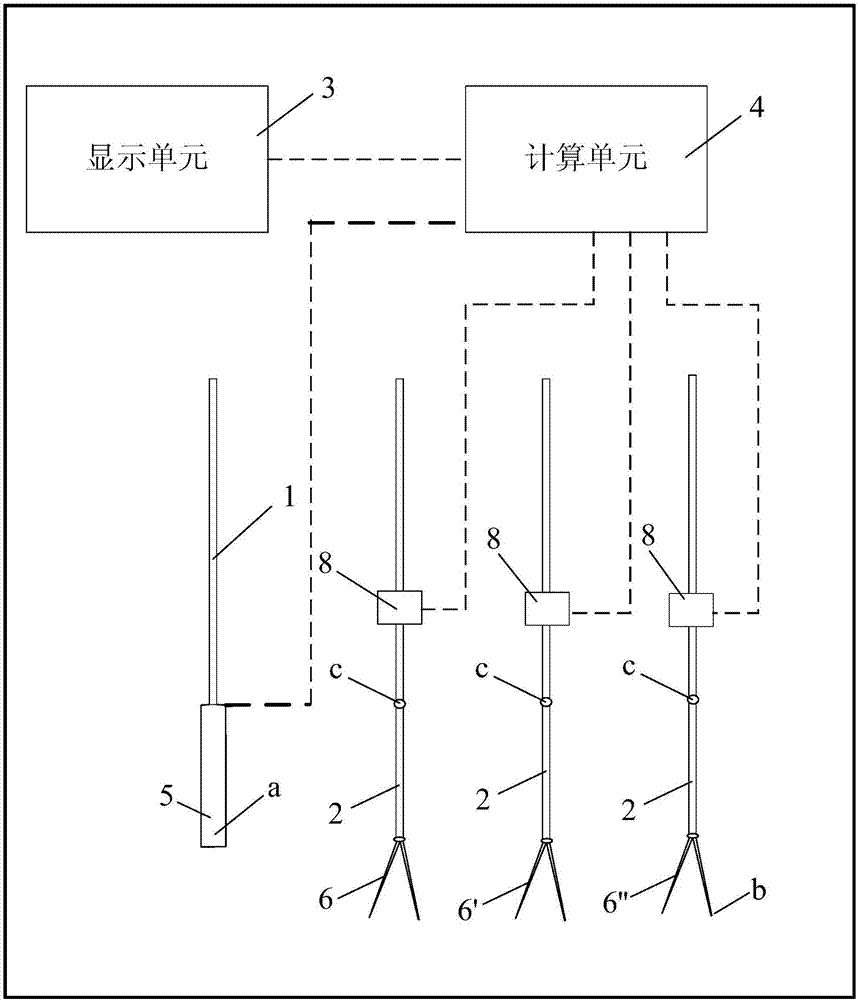
[0050] First, see figure 1 , Which is a structural block diagram of a surgical robot system provided by an embodiment of the present invention. The surgical robot system includes an image arm 1, a tool arm 2, a display unit 3 and a calculation unit 4...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More