

Walking chassis device for wall-climbing magnetic adsorption robot
A walking chassis and magnetic adsorption technology, applied in the field of robotics, can solve the problems of wall-climbing robots, such as large volume, difficult to disassemble the internal structure, and insufficient friction, and achieve the effect of simple and compact structure, large working space, and light weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on The embodiments of the present invention and all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
[0021] see Figure 1-4 , the present invention provides a technical solution:
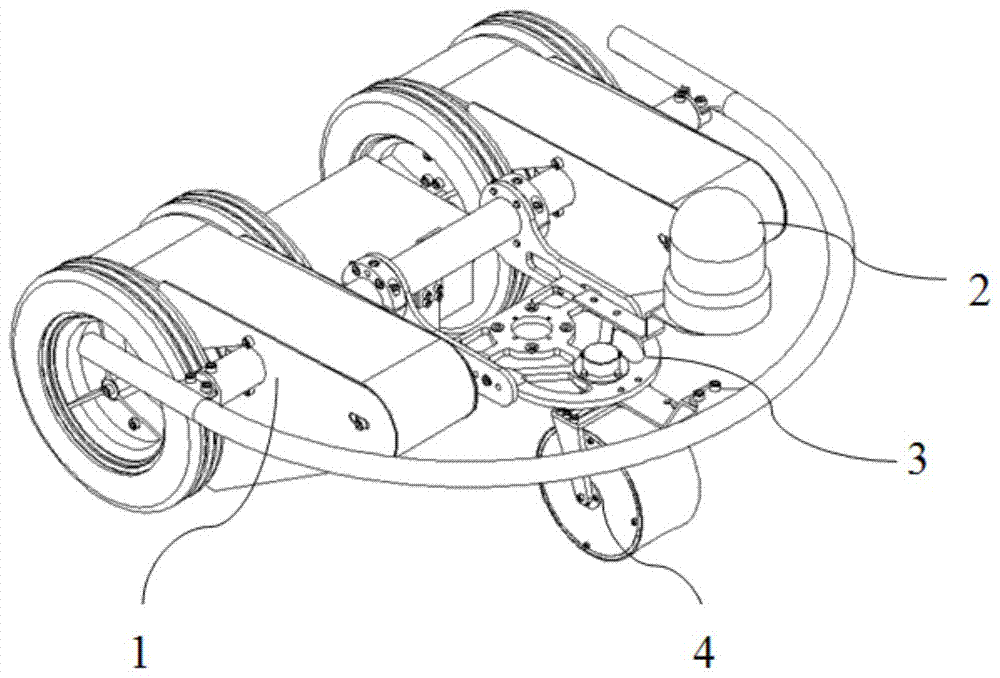
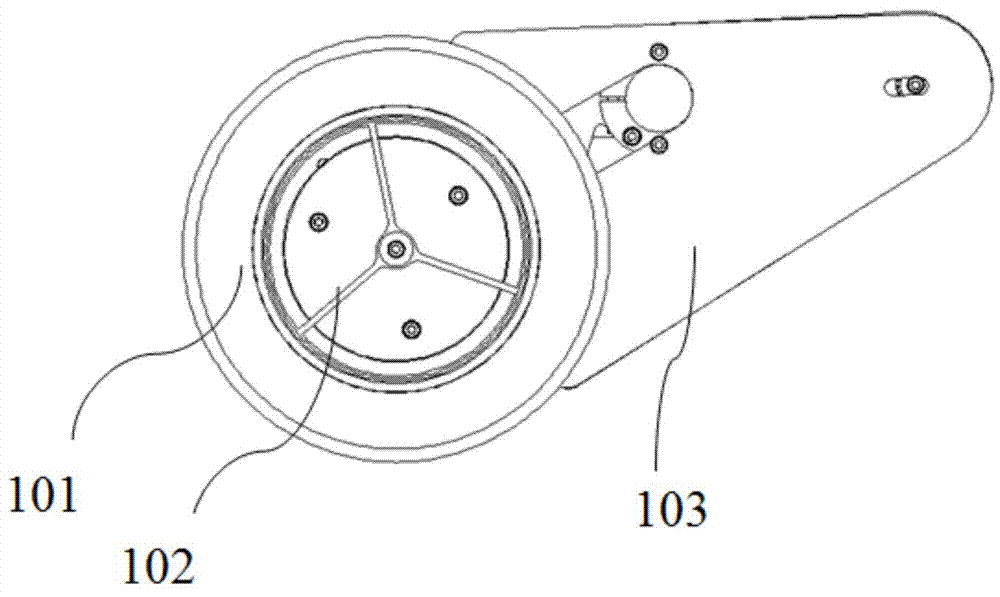
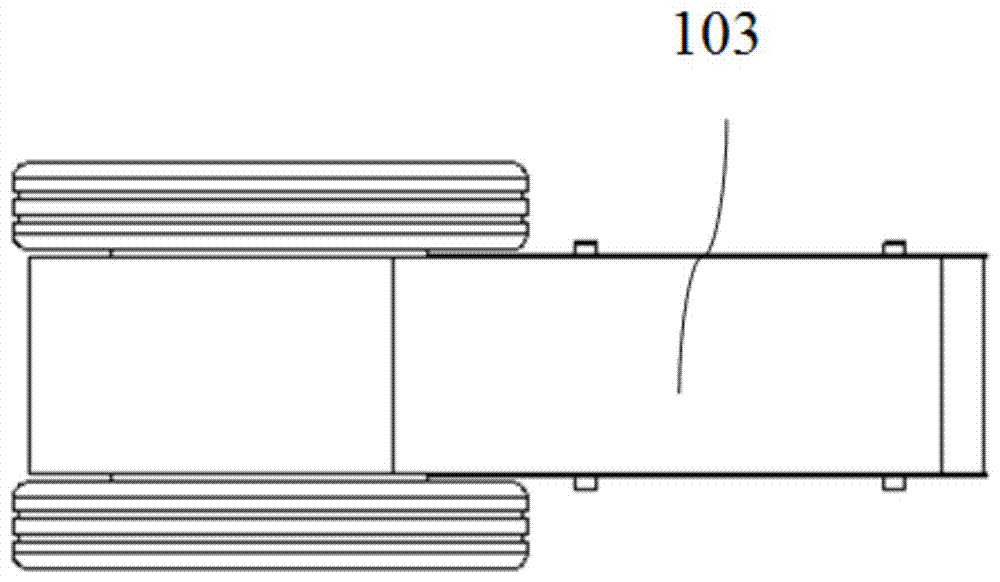
[0022] A walking chassis device for a wall-climbing magnetic adsorption robot, comprising two sets of magnetic drive wheels 1, an image acquisition device 2, a frame 3 and a universal wheel 4, the two magnetic drive wheels 1 are connected to the frame 3 The two sides of the rear end are connected, and the front end of the vehicle frame 3 is connected with the univer...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More