

System and method for planning paths of intelligent vehicles based on control sampling
A path planning and intelligent vehicle technology, which is applied to road network navigators, measuring devices, instruments, etc., can solve problems such as slow convergence speed, poor path enforceability, complex modeling, etc., and achieve the effect of smooth paths and reduced errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The technical solutions in the embodiments of the present invention will be described clearly and in detail below with reference to the drawings in the embodiments of the present invention. The described embodiments are only some of the embodiments of the invention.
[0038] The technical scheme that the present invention solves the problems of the technologies described above is:
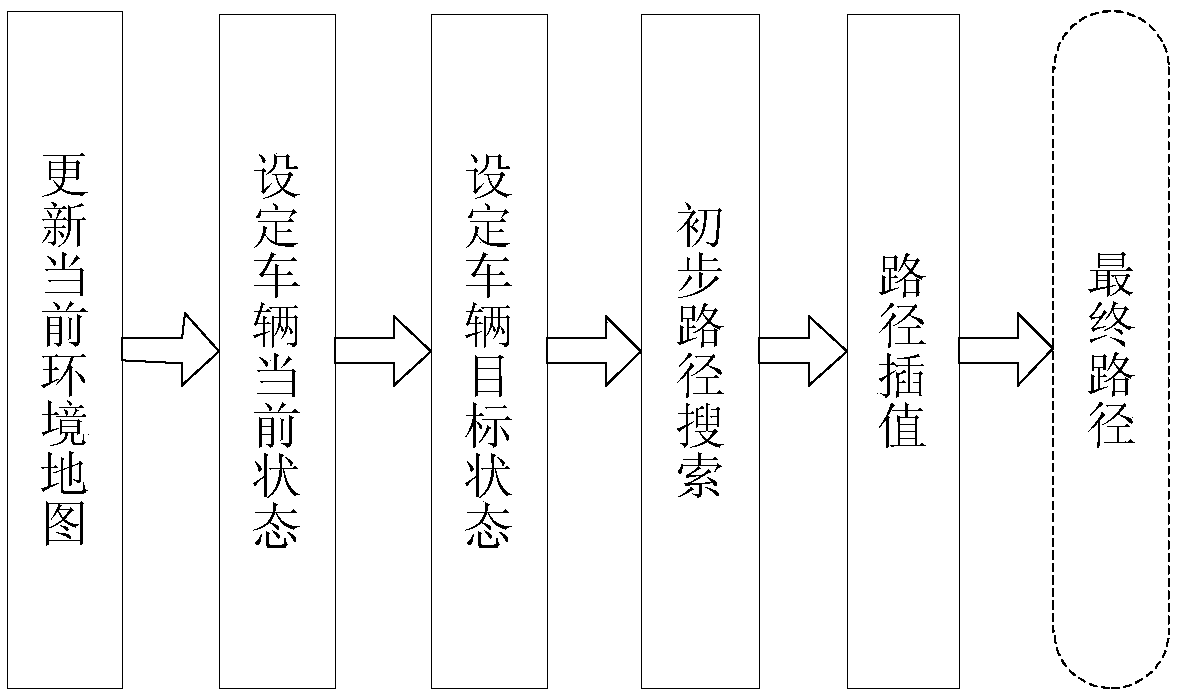
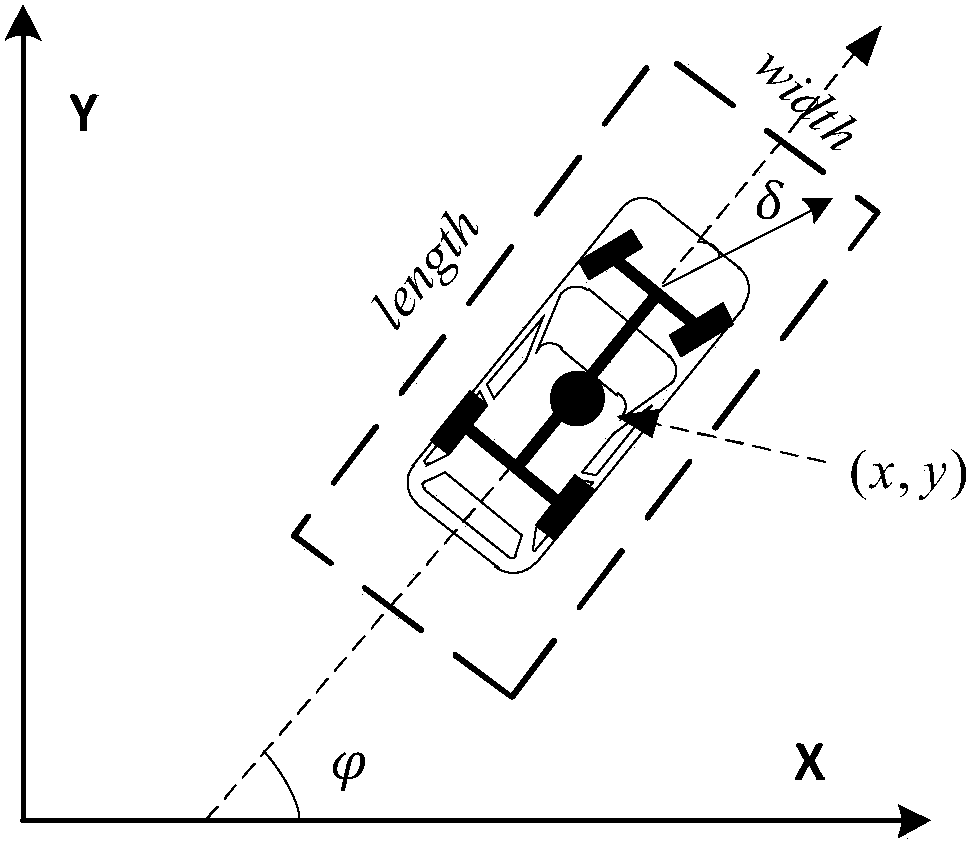
[0039] Firstly, according to the vehicle parameters, kinematic equations and derived vehicle state expansion equation and the sampling range of the control input (front wheel angle). Then, starting from the initial state (current state), the state tree is continuously expanded using the sampled control input until the leaf node of the state tree reaches the target point. At this point, an initial path consisting of a sequence of state points is obtained. Finally, the initial path is processed so that it can be traced for execution.
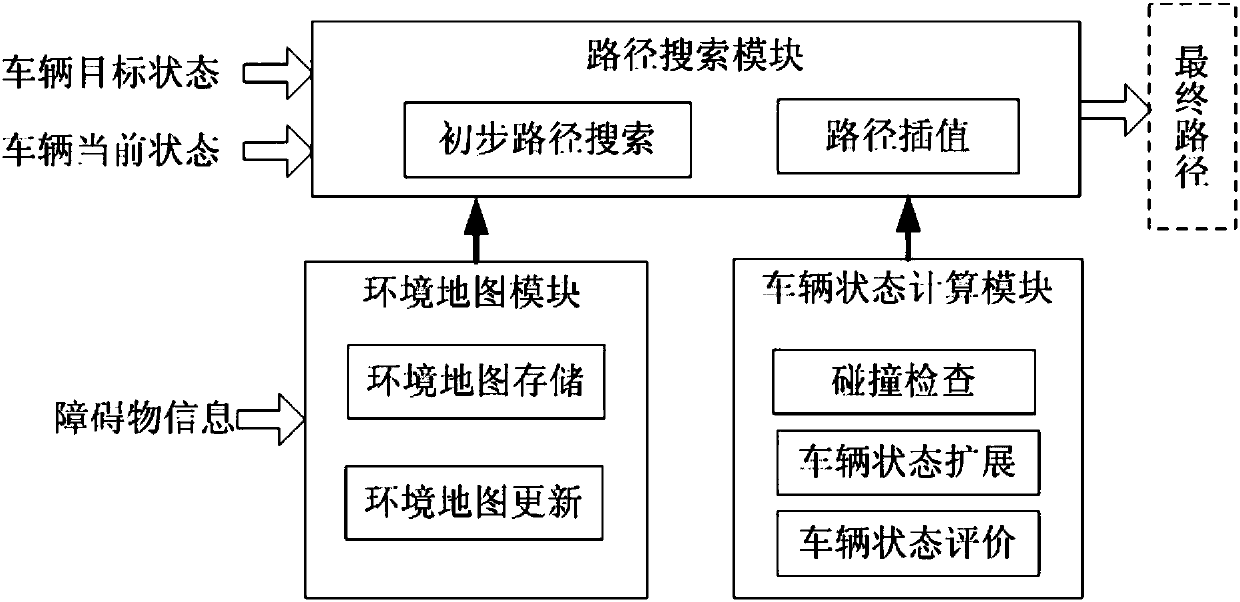
[0040] The specific working mode of the system of the p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More