

A motion control method for auv lateral push at low speed and no output
A motion control, no output technology, applied in adaptive control, general control system, control/regulation system, etc., can solve the problems of actuator dead zone, no output, control system performance degradation, etc., to improve response speed, select Accurate and reliable, the effect of shortening the adjustment time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention is described in more detail below in conjunction with accompanying drawing example:
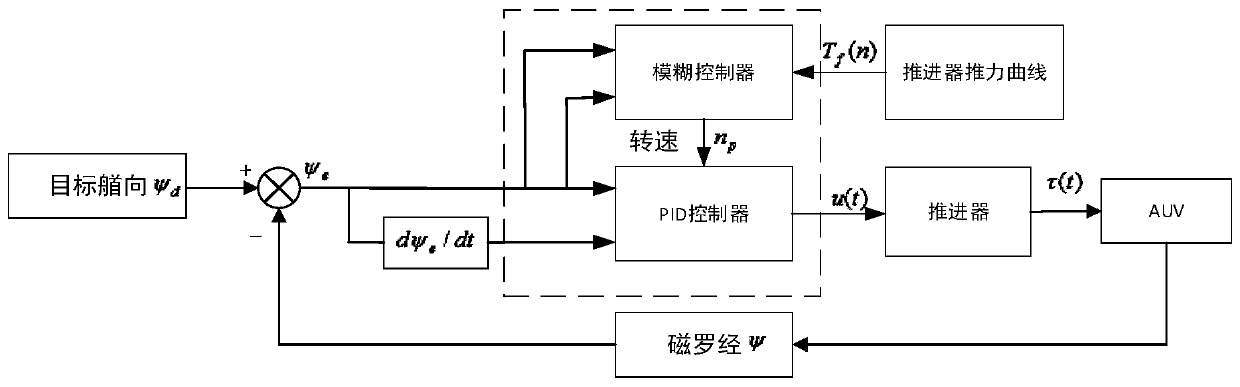
[0028] combine figure 1 , the control system structure of the present invention mainly includes target heading input, thrust curve, magnetic compass, fuzzy controller, PID controller, thruster, AUV carrier. The invention combines a fuzzy controller and a PID controller, and proposes a step output control method for determining the propeller speed and working time. The output of the controller is a step output to determine the propeller speed and working time, that is, within a given time interval, the propeller works at the required speed. When performing AUV heading control, the magnetic compass measures the current heading ψ of the AUV and the target heading ψ d Issued by the host computer, the heading deviation ψ is obtained according to the current heading and the target heading e , the rate of change of the differential deviation where the fuzzy controll...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More