

Robot global path planning method based on deeply enhanced learning
A technology of global path planning and reinforcement learning, applied in the directions of instruments, two-dimensional position/course control, vehicle position/route/altitude control, etc. And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] A global path planning method for a robot based on deep reinforcement learning proposed by the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
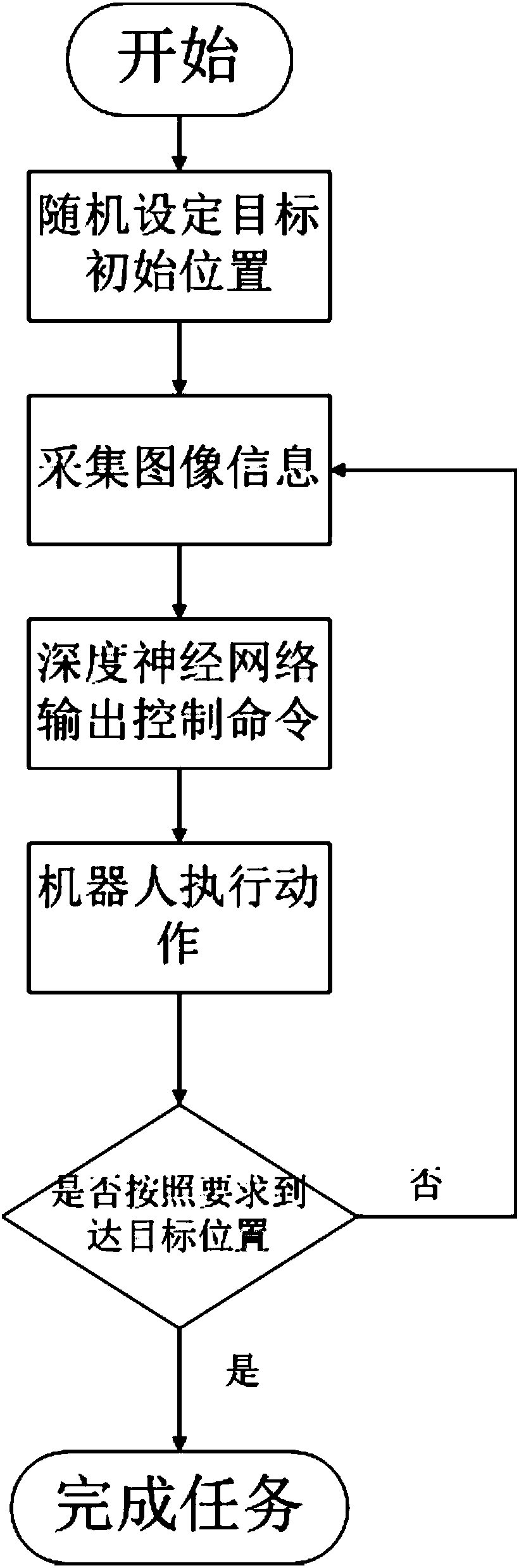
[0068] A global path planning method for a robot based on deep reinforcement learning proposed by the present invention is divided into two stages, a training stage and an execution stage, including the following steps:
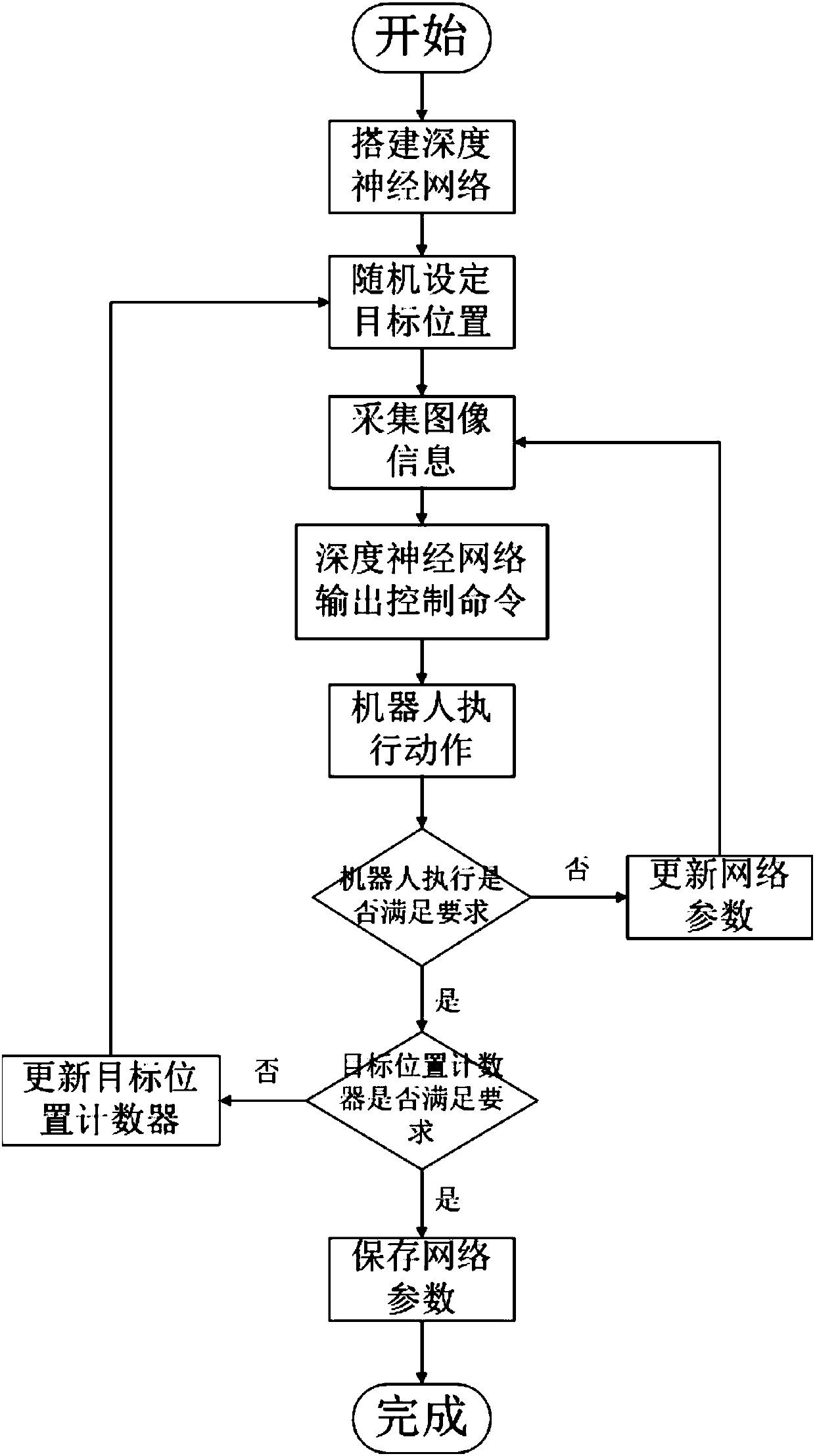
[0069] 1) Training phase; the process is as follows figure 1 As shown, the specific steps are as follows:
[0070] 1-1) Install a top-down camera in the scene where the global path planning of the robot is required;
[0071] The distance h from the ground in the scene where the global path planning of the robot is required g (The value range is 2m to 3.5m, and the distance in this example is 2.8m). The overhead camera is installed on the roof (there is no special requirement for the model of the overhead camera, and the produ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More