

Reverse movement navigation method in omnidirectional mobile robot channel
A navigation method and omnidirectional movement technology, which is applied in the field of robot motion planning and navigation, can solve problems such as unsuitable channel environment and unreasonable travel path planning, and achieve the problem of reverse navigation of mobile robots, which is easy to implement and has strong adaptability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, so that those skilled in the art can better understand the present invention and implement it, but the examples given are not intended to limit the present invention.
[0046] The reverse navigation method in the channel of the omnidirectional mobile robot of this embodiment includes the following steps:
[0047] Step 1: Control the robot to complete the forward movement in the channel, and estimate the current position information of the robot according to the encoder.
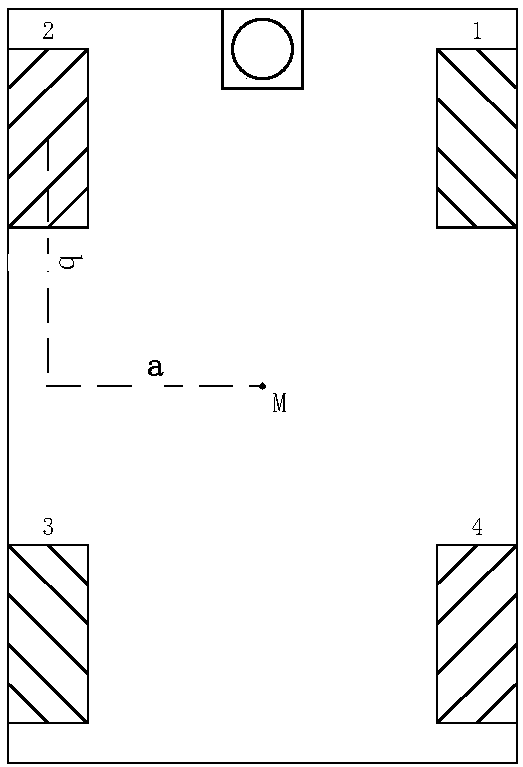
[0048] Such as figure 1 As shown, M is the geometric center position of the car, record the horizontal distance from the geometric center of the robot to the wheel as a, the longitudinal distance as b, and the current geometric center speed of the robot as v m , the velocity component in the horizontal direction is v mx , the component in the vertical direction is v my , the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More