

Three-dimensional route planning method for power line inspection of multi-rotor unmanned aerial vehicle
A multi-rotor UAV and power inspection technology, applied in the field of UAV, can solve the problems that cannot meet the power demand, have many altitude changes, and cannot be obtained effectively and quickly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The three-dimensional route planning method for multi-rotor unmanned aerial vehicle power inspection of the present invention comprises the following steps:
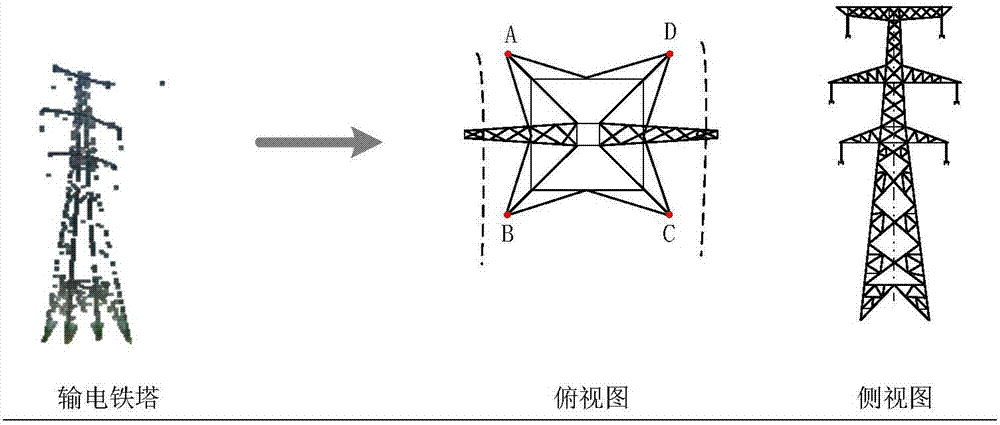
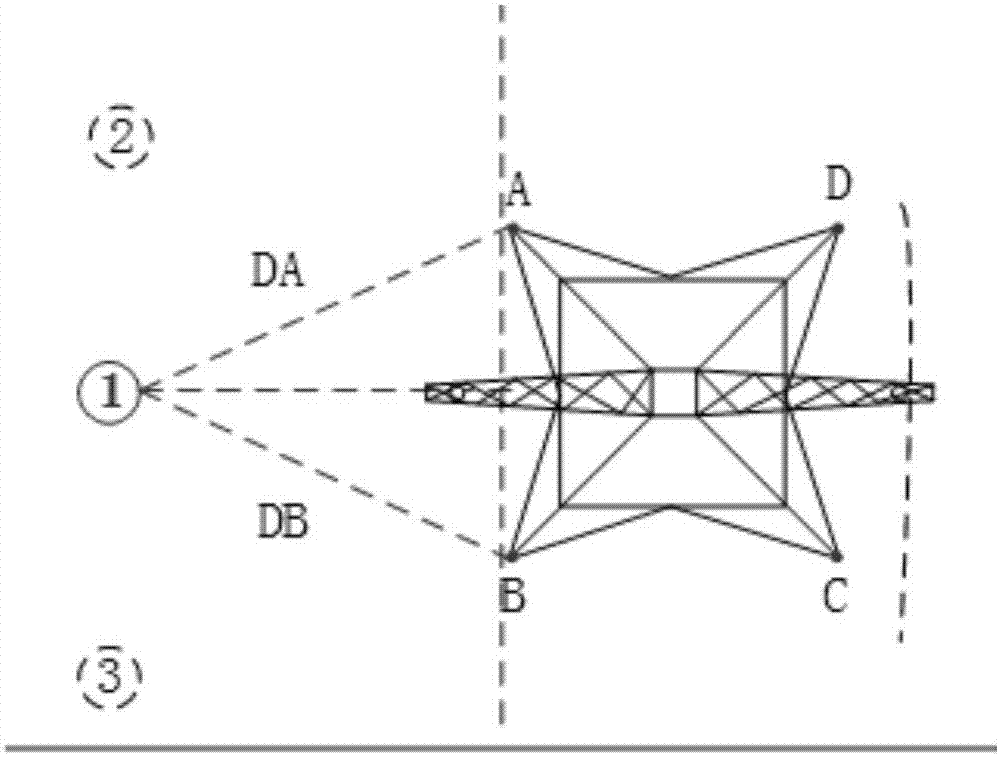
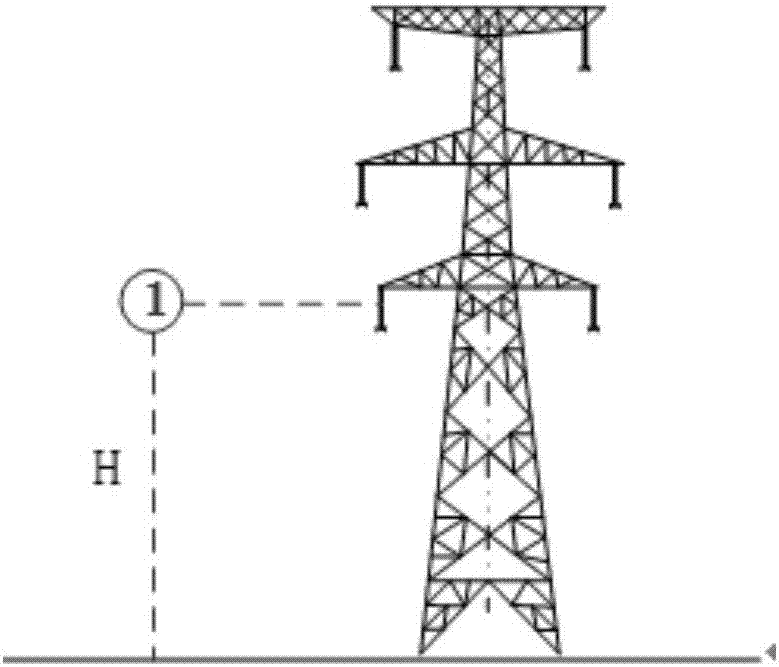
[0036] S1. Establish a route drawing board; perform orthographic projection on the transmission line iron tower to obtain the iron tower top view drawing board and the iron tower side view drawing board; decompose the iron tower into two parts, the top view and the side view, which are used to determine the horizontal latitude and longitude and height information of the waypoint respectively, figure 1 It is an exploded view of the transmission line tower; figure 2 Draw a schematic diagram of the top view of the tower; image 3 Draw a schematic diagram of the side view of the tower;
[0037] S2, establish the coordinate system of the drawing board of the iron tower top view; Figure 4 As shown, since the distribution position and orientation of each iron tower are different, the relative position relationship be...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More