

Active flexible force control device
A technology for controlling equipment and flexible force, applied in the direction of torque/mechanical power control, non-electric variable control, control/regulation system, etc. Applicable and other issues, the load range can be easily adjusted, the self-weight and load can be overcome, and the dynamic response speed is fast.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
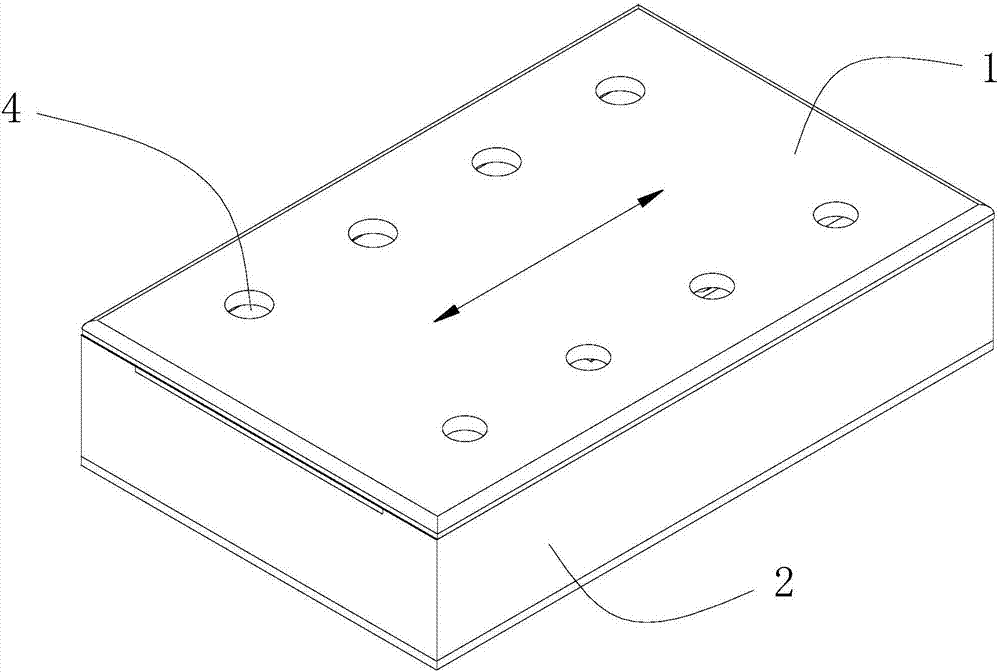
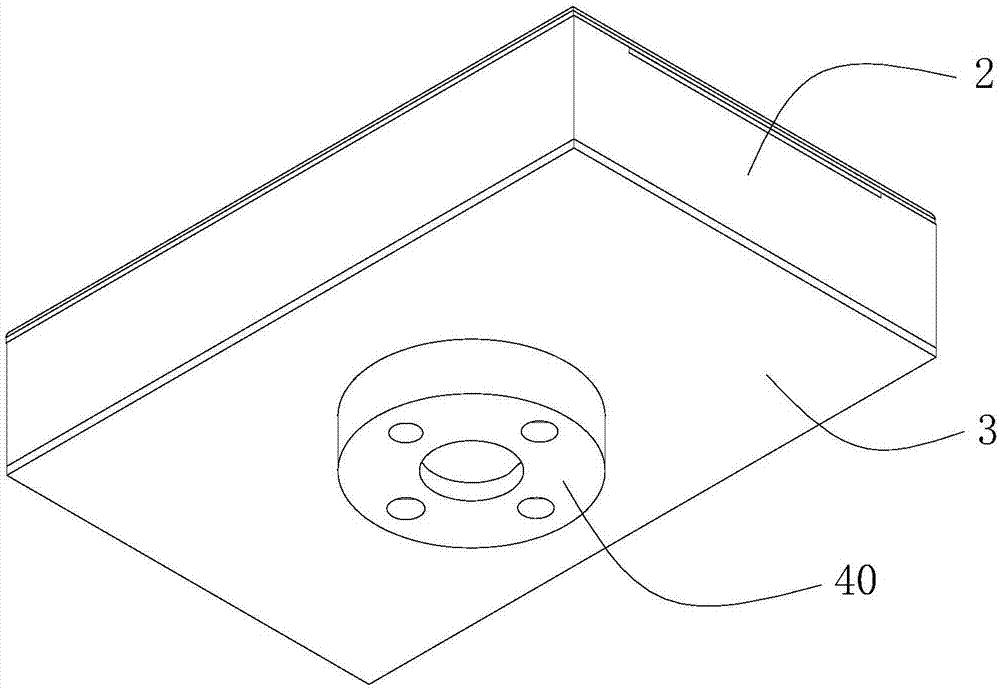
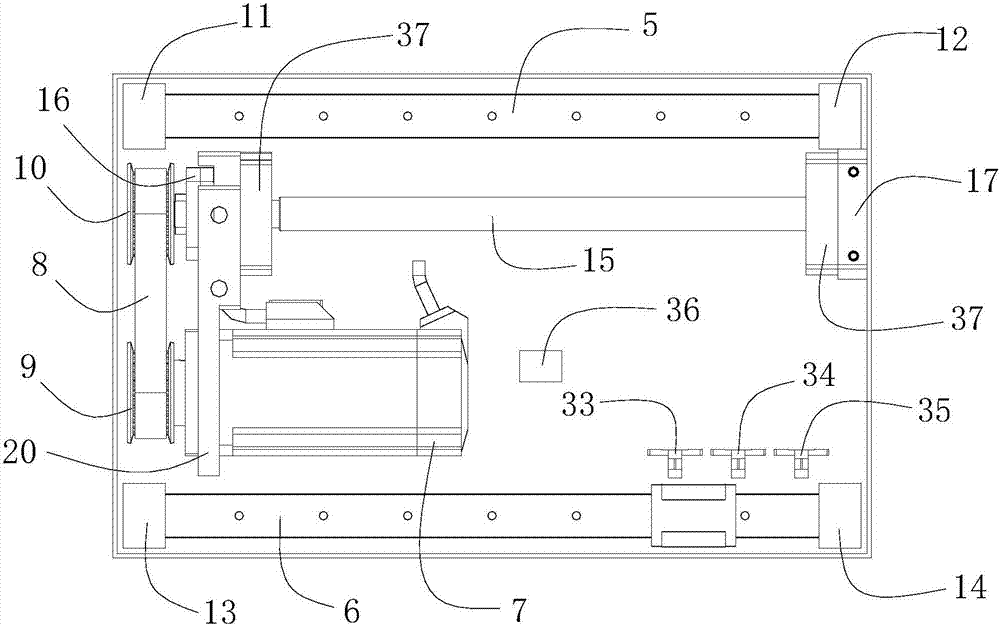
[0036] refer to Figure 1 to Figure 16 , is an active flexible force control device, which includes a force control body, the force control body includes an upper cover 1, a protective cover 2 and a bottom plate 3, the protective cover 2 is arranged around the periphery of the bottom plate 3, and the upper cover 1 seals the protective cover 2 On the upper side, the bottom plate 3 seals the lower side of the protective cover 2; the force control body is provided with a fixed mechanism, an intermediate motion connection mechanism and a motion platform mechanism; the intermediate motion connection mechanism is arranged on the fixed mechanism and slides along it, and the motion platform mechanism is set On the lower side of the upper cover 1 and the moving platform mechanism can slide along the fixed mechanism; the upper cover 1 is provided with a threaded hole 4, and the force control object to be controlled is installed on the force control body through the threaded hole 4; the f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More