A trajectory planning method for industrial robot obstacle avoidance based on torque control
An industrial robot and trajectory planning technology, which is applied in the direction of program-controlled manipulators, manufacturing tools, manipulators, etc., can solve problems such as inability to effectively avoid obstacles, low control precision, and low safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The present invention will be further described below in conjunction with the accompanying drawings.
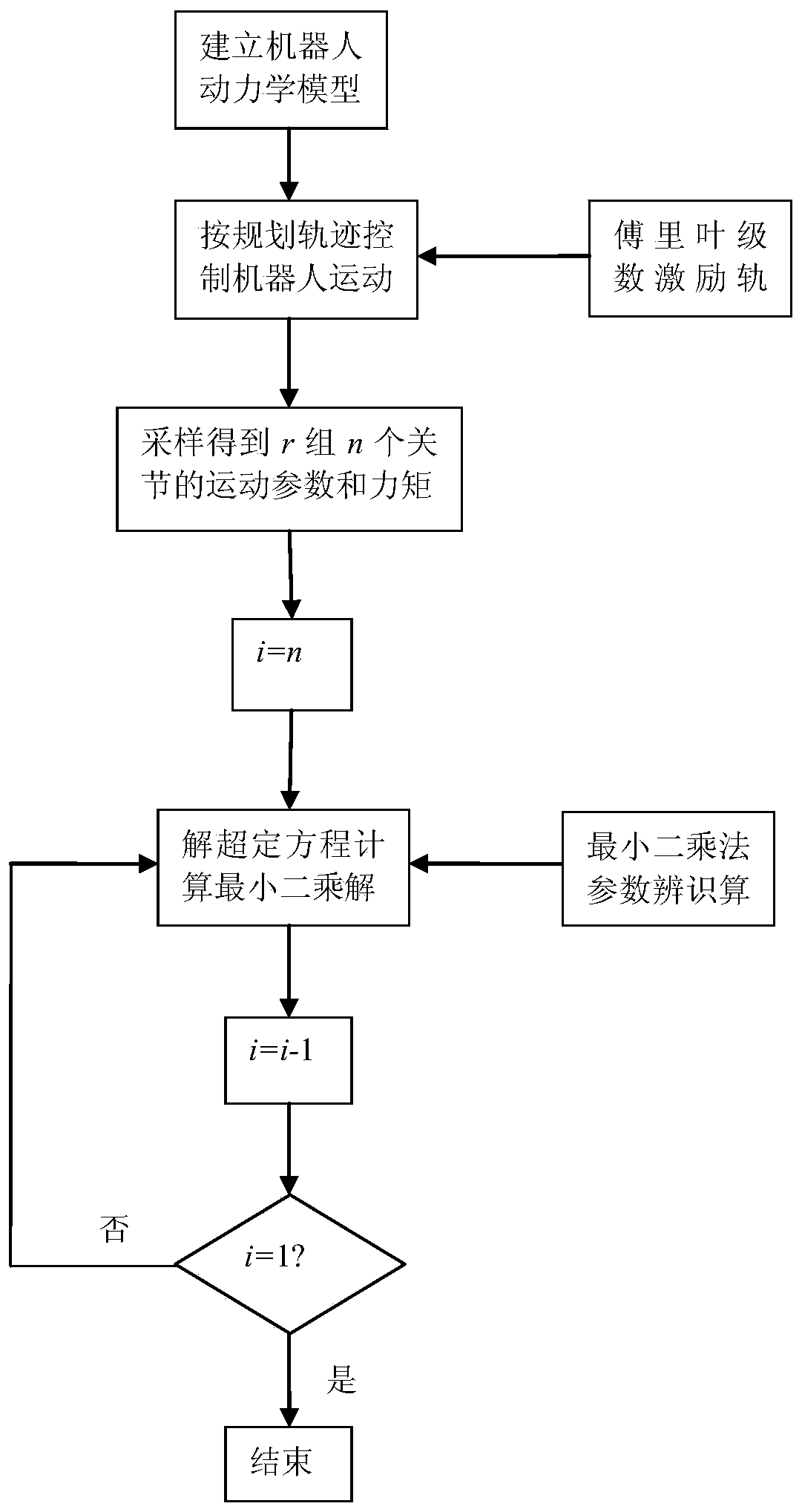
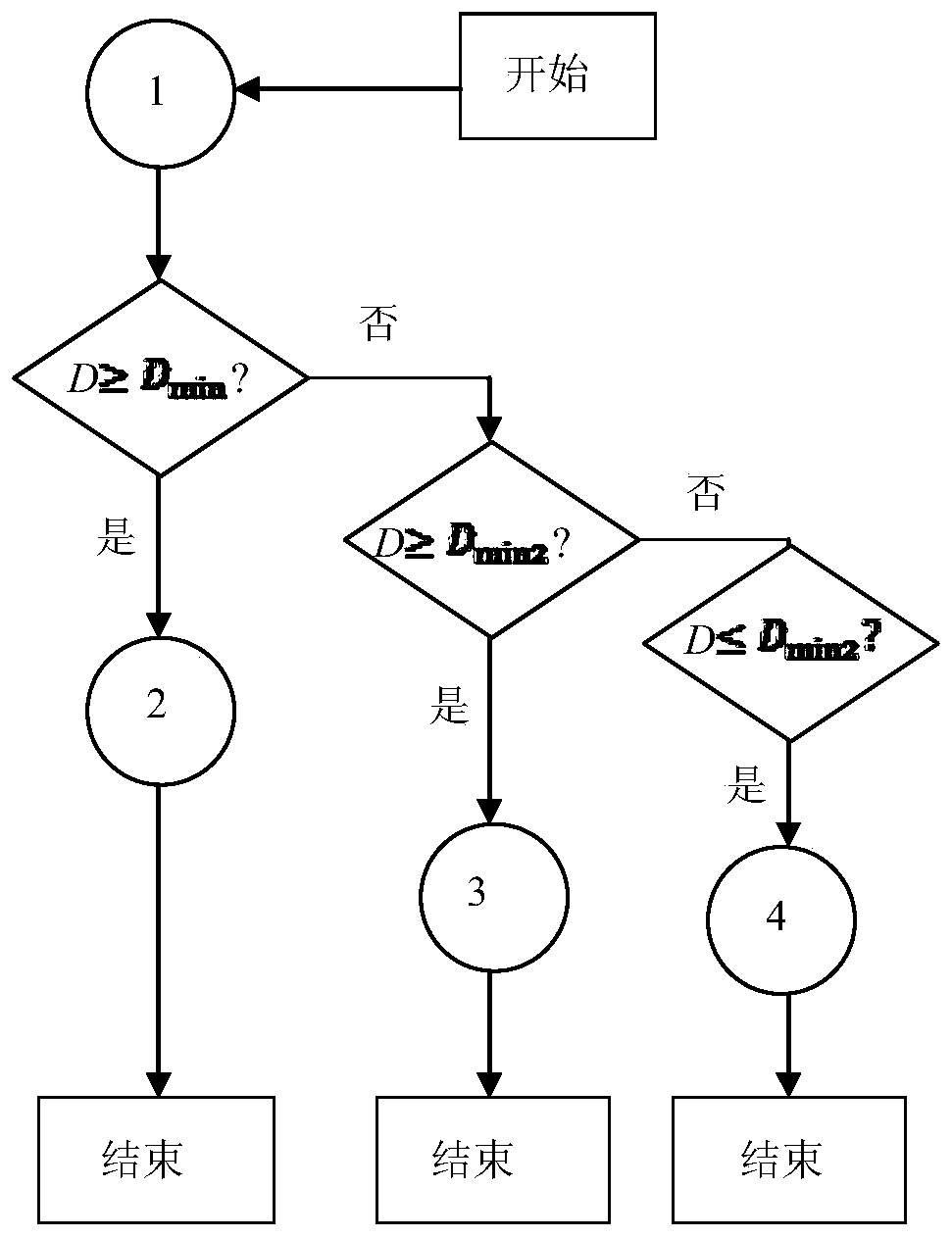
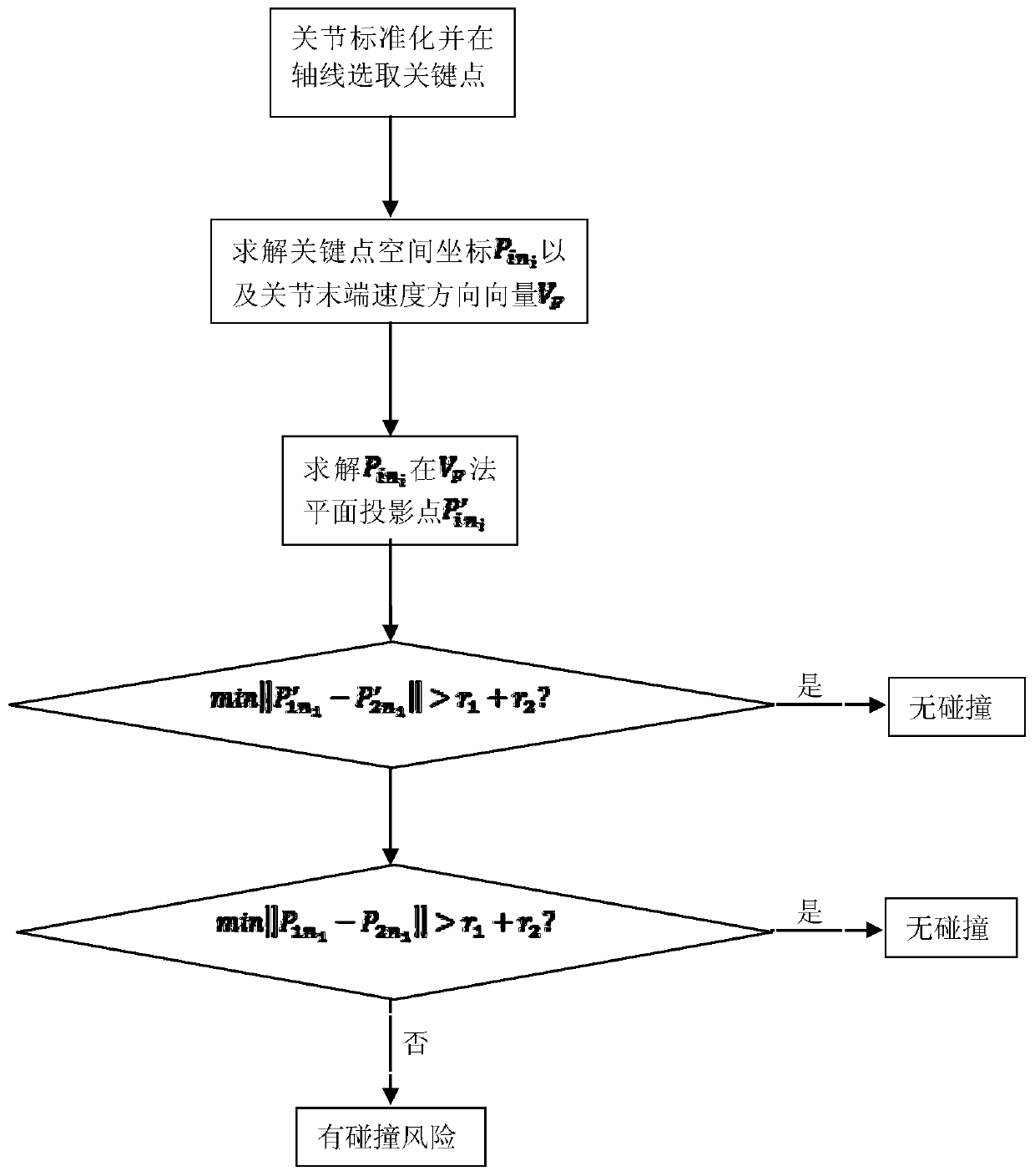
[0066] refer to Figure 1 ~ Figure 4 , an obstacle avoidance trajectory planning method for industrial robots based on torque control. First, an accurate robot dynamics model is established by identifying the kinematics and inertia parameters of each joint; Displacement; finally, using the joint angular displacement as the motion distance, a sinusoidal jerk planning method is used to plan the velocity acceleration of each joint. The control torque in the motion path can be solved by substituting the velocity and acceleration into the dynamic model. For collisions that may occur during operation, the present invention uses a method of detecting joint projection interference and then judging the distance of key points for collision prediction: project the robot joints to the normal plane of the velocity vector, and if the joint projection interferes, the joint axis Jud...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com