

System for grabbing object based on NAO robot
A technology for robots and objects, which is applied in the field of intelligent robots and can solve the problems of low positioning accuracy and poor real-time performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
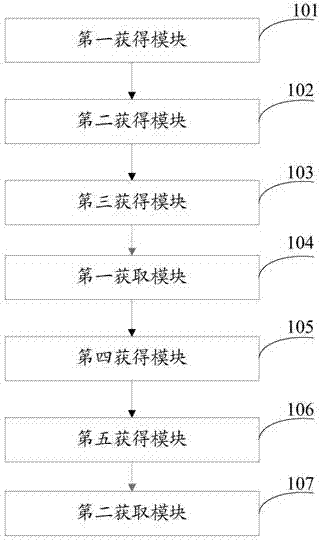
[0056] This embodiment provides a system for grasping objects based on NAO robots, the system comprising:
[0057] The first obtaining module 101 is configured to use a preset search path to find and identify a target object based on a color segmentation method, and obtain an image containing the target object and the pixel coordinates of a first center point of the target object;
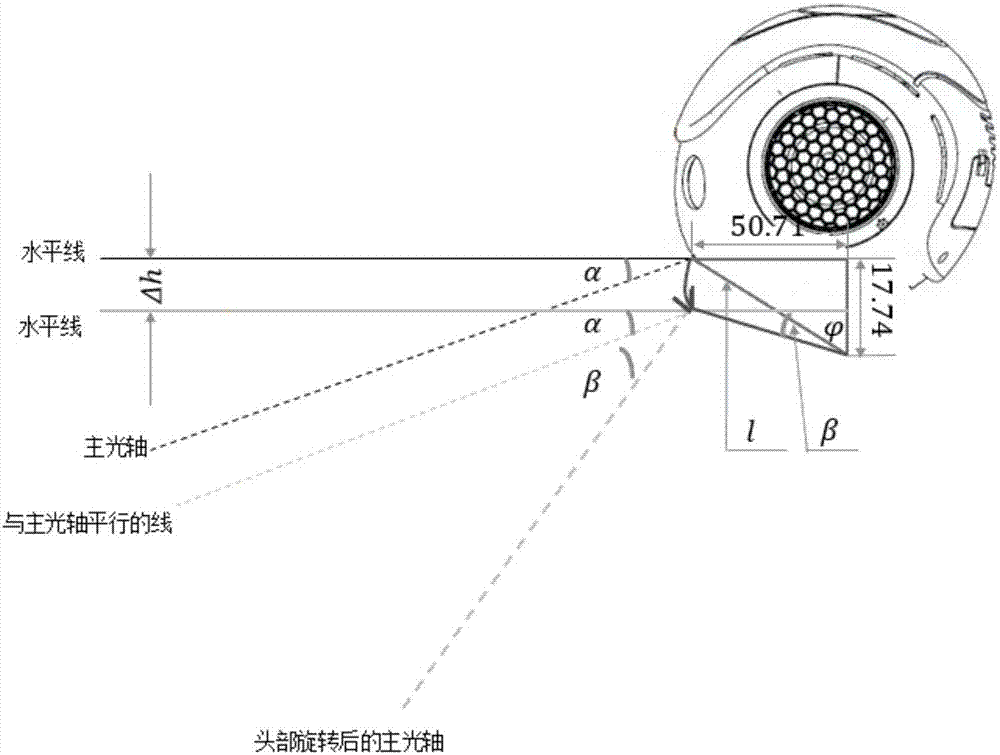
[0058] The second obtaining module 102 is used to obtain the first functional relationship between the change value of the head height of the NAO robot and the pitch angle Among them, Δh is the change value of the head height of the NAO robot, β is the pitch angle of the head of the NAO robot, is a fixed value;
[0059] A third obtaining module 103, configured to obtain a second functional relationship between the distance from the target object to the NAO robot and the pitch angle according to the first functional relationship Among them, s is the distance from the target object to the NAO ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More