Taking-off and landing system without undercarriage for high-aspect-ratio solar unmanned aerial vehicle
A technology of solar unmanned aerial vehicles and large aspect ratio, which is applied to aircraft parts, ground devices, launching/dragging transmissions, etc., can solve damage to aircraft, solar unmanned aerial vehicles have no good solution, and are not suitable for solar unmanned aerial vehicles. Man-machine large aspect ratio aircraft and other issues, to achieve the effect of enhancing load capacity, improving endurance, and reducing design difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0019] In order to make the objects and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
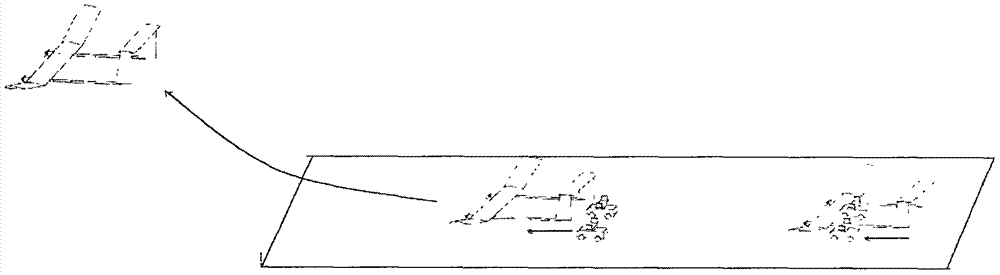
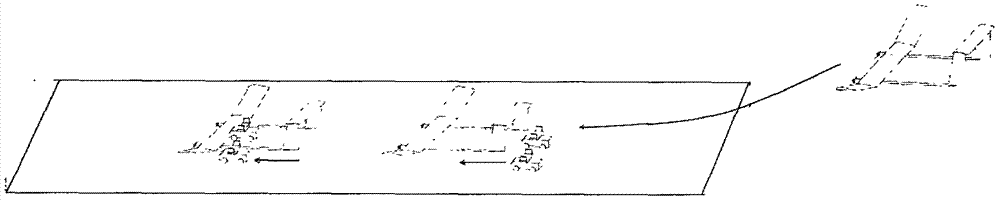
[0020] Such as Figure 3-Figure 4 As shown, the embodiment of the present invention provides a large-aspect-ratio solar unmanned aerial vehicle landing gear system, including a ground station and an unmanned vehicle, and the ground station, unmanned vehicle and solar unmanned aerial vehicle are realized through a high-speed data link. Real-time communication; the unmanned vehicle includes a car body, a slide rail and a slider clamping mechanism, the slide rail is installed on the top surface of the car body through a rotating shaft, and can be controlled to rotate and move up and down, and the slide rail is connected to the car body A damping m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com