

Indoor positioning method based on PDR and geomagnetism fusion
A technology of geomagnetic and modeling methods, applied in the field of positioning, can solve problems such as high algorithm complexity, fuzzy solution of positioning, and inaccurate estimation of pedestrian step length
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] Taking the indoor positioning of pedestrians holding smart phones as an example, the present invention will be further described in detail, so as to facilitate a full understanding of the present invention.
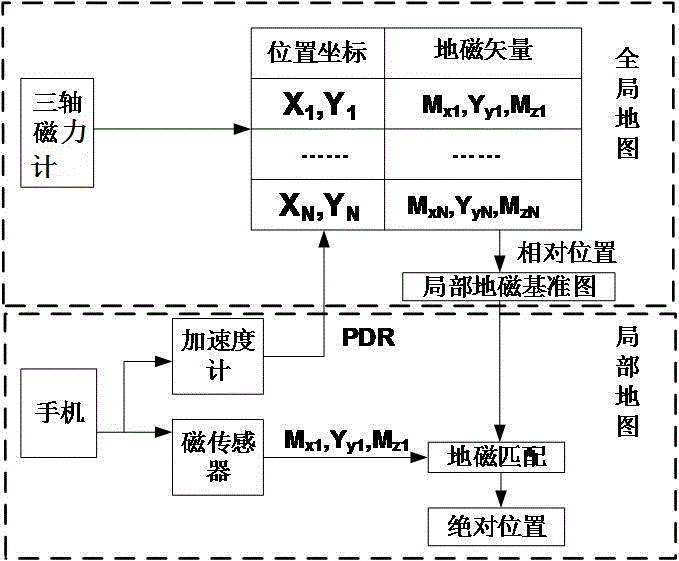
[0014] Such as figure 1 As shown, the block diagram of the indoor positioning method provided in this embodiment is described, which mainly includes the following steps:
[0015] Step 1: Use the built-in three-axis magnetometer of the mobile phone to measure and store the geomagnetic data in the room. Draw an indoor plane map, pre-set the indoor geomagnetic data collection route, and mark the position coordinates of the geomagnetic data points to be collected (X N , Y N ), use the built-in three-axis magnetometer of the mobile phone to collect the coordinate points of the position to be measured according to the preset route (X N , Y N ) geomagnetic data (M xN , Y yN ,M zN ), the collected data is stored by the mobile phone.
[0016] Step 2: Establish an in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More