

Parking lot automatic mapping and high-precision localization method based on parking locations and two-dimensional codes
A two-dimensional code, parking lot technology, applied in the field of automatic mapping and high-precision positioning, can solve problems such as high cost, difficult equipment, lack of rich textures, etc., to achieve the effect of strong practicability, improved accuracy, and elimination of accumulated noise
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] Based on the technical solution of the present invention, the technical solution of the present invention will be introduced in more detail below in conjunction with the accompanying drawings.
[0019] The steps are in order:
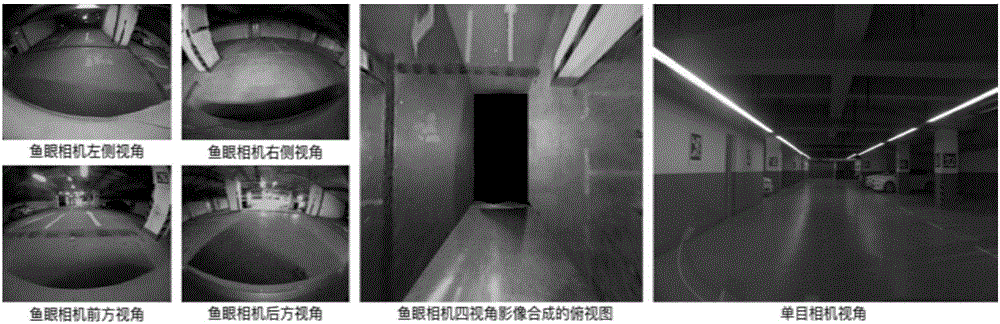
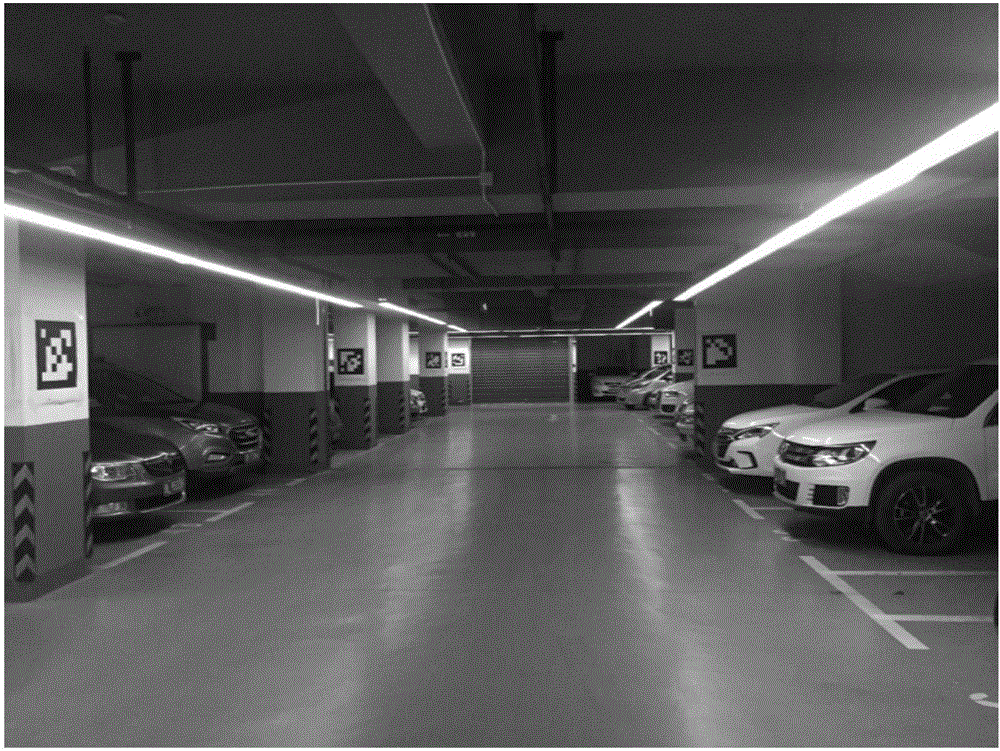
[0020] 1. Obtain the image information of the front of the vehicle and the ground around the vehicle through a low-cost forward-looking monocular camera and a fisheye surround-view camera
[0021] Visual sensor layout and calibration:
[0022] 1.1 Layout
[0023] The present invention adopts 1 forward-looking camera and 4 fisheye surround-view cameras, the resolution of the forward-view camera is 1080p or above, the horizontal field of view is between 75-90 degrees, the frame rate is 25Hz, and the delay is less than 5ms; the fisheye surround-view camera The resolution is 720p or above, the horizontal field of view is 180 degrees, the frame rate is 25Hz, and the delay is less than 5ms. Among them, the forward-looking camera is arranged between ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More