

Method for simultaneous localization and mapping of mobile robot based on improved particle filter
A mobile robot and map construction technology, applied in navigation computing tools and other directions, can solve the problems of particle filter with large calculation amount and particle degradation, etc., achieve good effect, convenient implementation, and reduce calculation amount
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
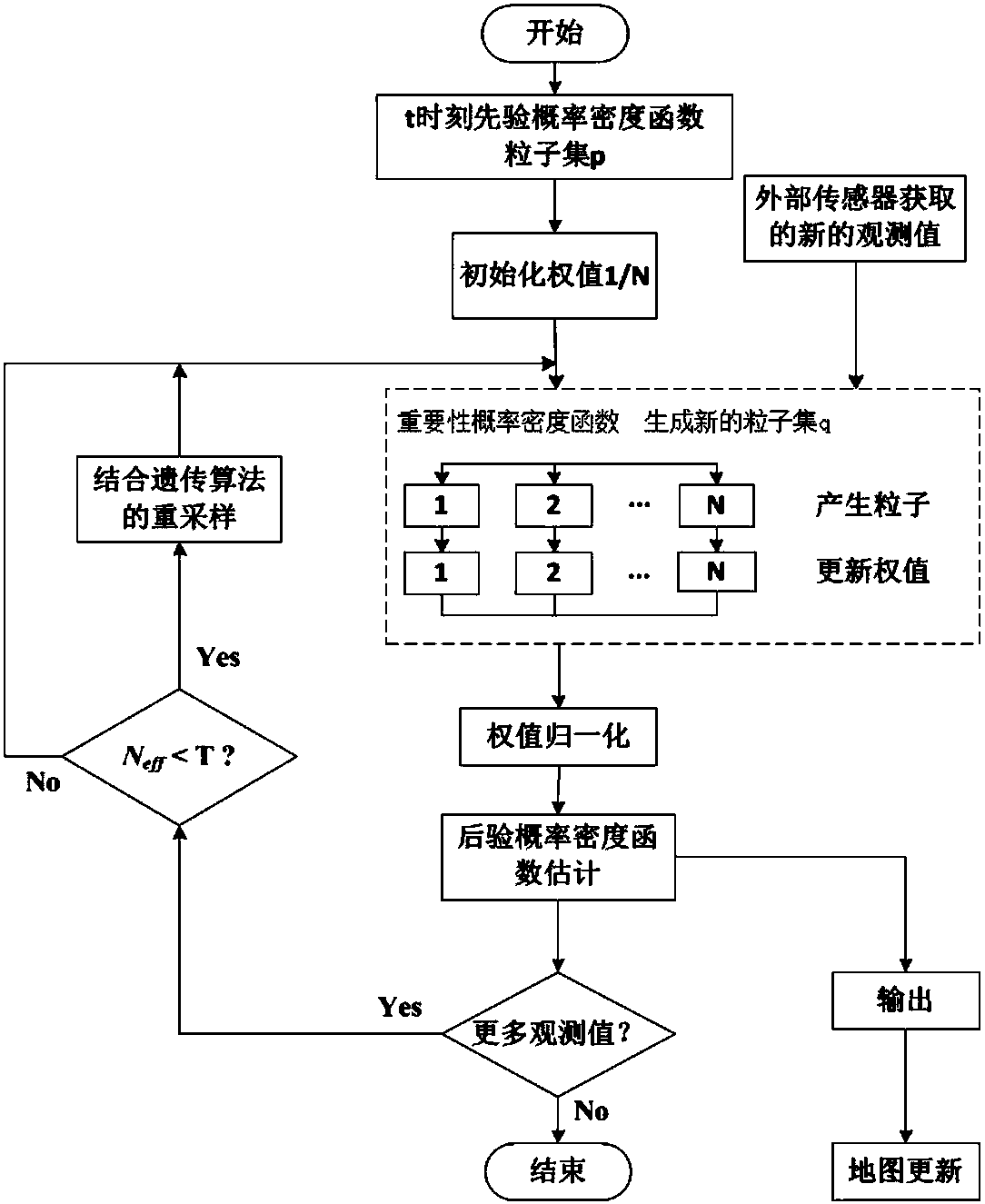
[0042]The mobile robot localization and map construction method based on the improved particle filter, by using the improved particle filter algorithm, when selecting the importance probability density function, the proposed distribution combining the motion model and the observation value is selected. In the resampling stage of the particle filter, the threshold for judging the number of effective particles is set as a dynamic threshold, and different thresholds are selected according to the complexity of the environment; the genetic algorithm is introduced, and the selection, crossover, and mutation in the algorithm are selected. Genetics is also used in the selection of particles, which not only ensures the sufficient number of particles, but also prevents the singleness of particles.
[0043] The present invention will be described in detail below in conjunction with the accompanying drawings.
[0044] First, initialize the pose of the robot at the initial moment, and gene...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More